Silnik elektryczny pod lupą - co możemy odczytać z tabliczki znamionowej silnika elektrycznego


- Zakłady przemysłowe
- Woda i ścieki
Przy doborze przemiennika częstotliwości głównie rozpatrujemy silnik – jego moc, zasilanie czy prąd. W tym artykule znajdziesz najważniejsze informacje na temat silnika wraz z ich znaczeniem, które mogą się przydać także przy doborze silnika do aplikacji, a w następnej kolejności do doboru odpowiedniego falownika.
Powrót do Akademii falowników Unitronics
Czym jest silnik elektryczny?
Silnik elektryczny jest to maszyna, która zamienia energię elektryczną prądu elektrycznego na energię mechaniczną. Prościej mówiąc podłączenie do silnika prądu elektrycznego wprawi go w ruch.
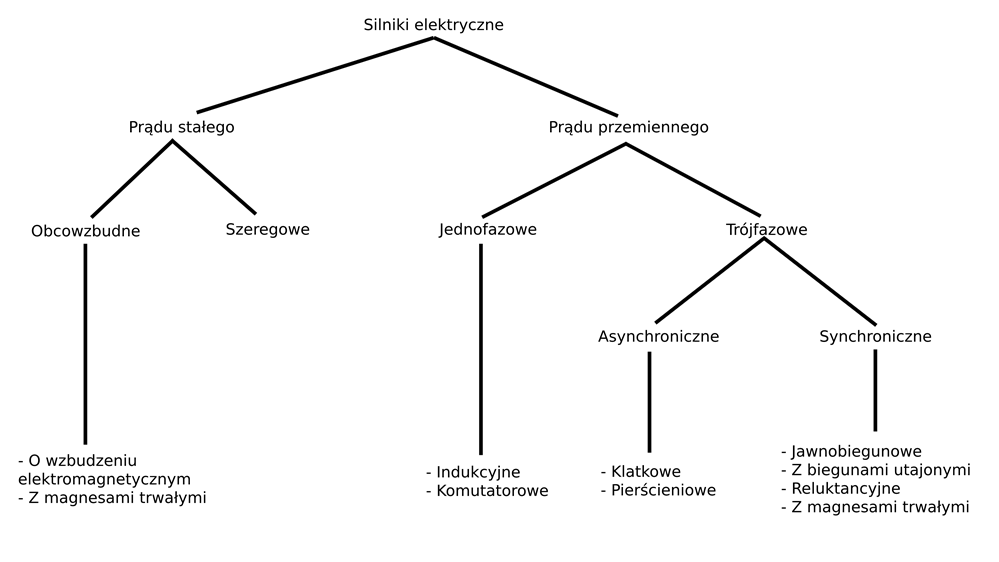
Podstawowy podział silników elektrycznych
Silniki eklektyczne możemy zasilić dwoma różnymi rodzajami napięcia – stałym lub zmiennym. Właściwość ta stworzyła 2 główne grupy, na które dzielimy silniki. Poniżej został przedstawiony podział silników elektrycznych. W automatyce w większości aplikacji są używane silniki elektryczne asynchroniczne klatkowe i to właśnie na omawianiu tego rodzaju silnika skupimy się w dalszej części.
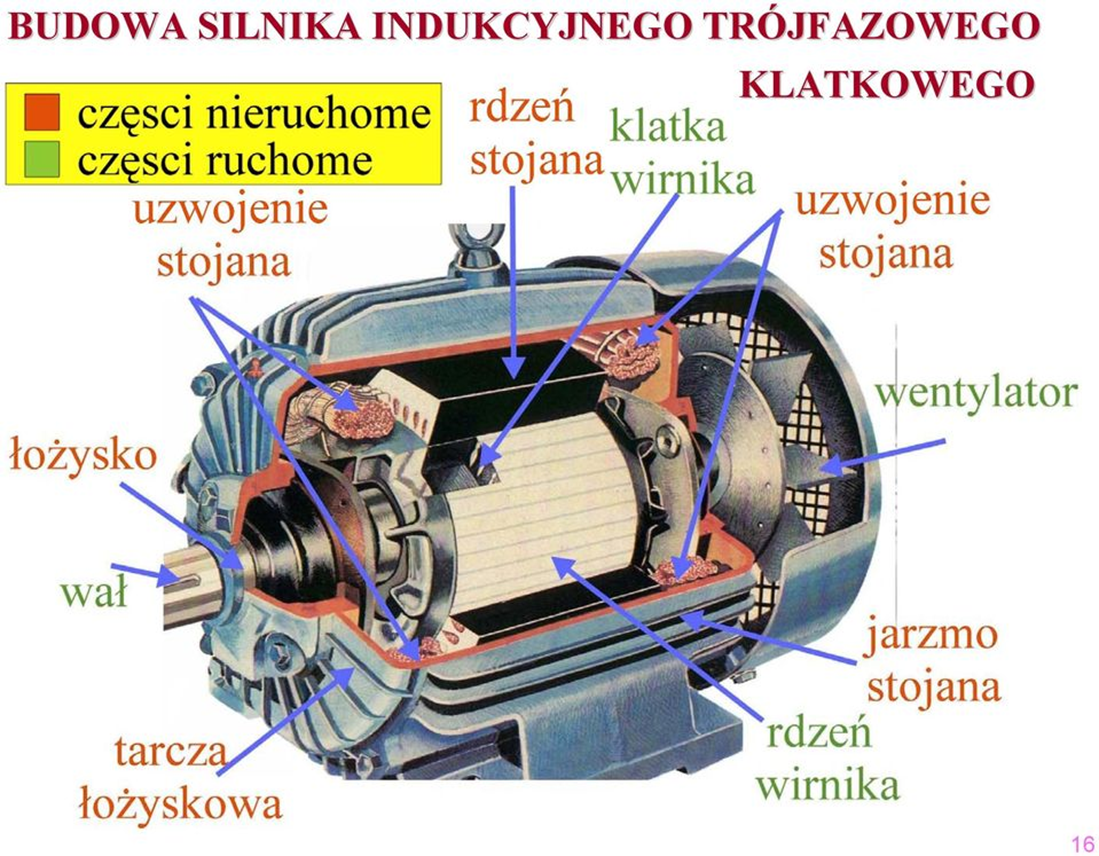
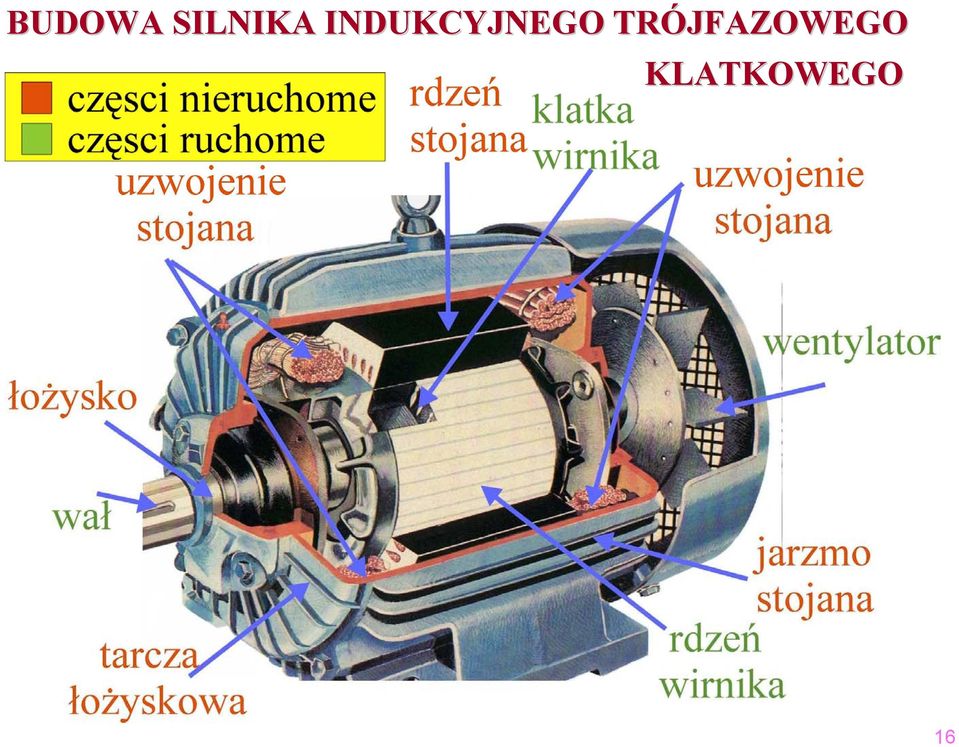
Budowa i zasada działania silnika asynchronicznego klatkowego
Najważniejszymi elementami w budowie silnika asynchronicznego klatkowego jest nieruchomy stojan oraz ruchomy/wirujący wirnik.
W konstrukcji rdzenia stojana (od wewnętrznej strony) i wirnika (od zewnętrznej strony) wykonuje się żłobienia, w których następnie umieszcza się uzwojenia. Kształt żłobień i ich liczba różni się w zależności od producenta i silnika. Pomiędzy wirnikiem, a stojanem powinna być jak najmniejsza szczelina powietrzna.
Uzwojenie stojana wykonywane jest z izolowanego drutu, specjalnie zaimpregnowanego i usztywnionego w celu zmniejszenia skutków drgań mechanicznych podczas działania urządzenia.
Zasada działania silnika asynchronicznego klatkowego
Uzwojenia stojana wytwarzają wirujące pole elektromagnetyczne, które obraca się wokół nieruchomego wirnika. Wytworzone pole przecinane jest przez klatkę wirnika. Zaczyna się tam indukować napięcie, a następnie zaczyna płynąć prąd elektryczny.
Skutkiem pojawienia się prądu w polu magnetycznym jest powstanie siły elektrodynamicznej, która działa stycznie do obwodu wirnika. W związku z tym pojawia się także moment elektromagnetyczny, który wprawia w ruch wirnik, a ten zwiększa swoją prędkość obrotową.
Jeśli zwiększymy obroty wirnika to spowoduje, że jego klatka będzie przecinać pole magnetyczne z coraz mniejszą prędkością. Skutkiem tego będzie zmniejszenie indukowanej siły elektromotorycznej oraz spadek prądu, który płynie w prętach klatki, a zatem spadnie również moment elektromagnetyczny. Wirnik przestanie przyspieszać i będzie poruszać się ze stałą prędkością w momencie, gdy wartość momentu elektromagnetycznego będzie równa momentowi obciążenia. Jeśli nie istniałby żaden moment oporowy, wirnik osiągnąłby szybkość wirowania pola magnetycznego (czyli osiągnąłby prędkość synchroniczną). Praktycznie taka sytuacja nie będzie miała miejsca, ponieważ zawsze występuje moment obciążenia (np. pochodzący z łożysk lub oporów powietrza). W takim przypadku wirnik osiągnie prędkość obrotową mniejszą od prędkości synchronicznej. Stanie się to wtedy, gdy moment elektromagnetyczny i obciążenia będą miały taką samą wartość. Jest to tak zwana prędkość asynchroniczna, dzięki której silnik zawdzięcza swoją nazwę.
Tabliczka znamionowa silnika
Nieodłącznym elementem każdego silnika elektrycznego jest tabliczka znamionowa. To dzięki niej poznajemy dane techniczne silnika, które następnie wprowadzamy do przemiennika częstotliwości. Dobre zrozumienie ich jest istotne podczas pracy oraz sterowania.
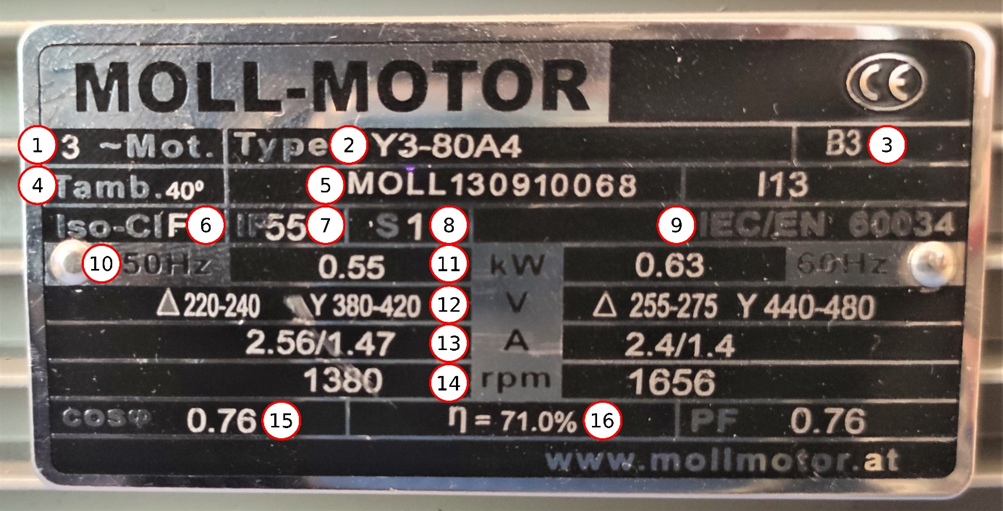
1 - Rodzaj silnika
Jako pierwszy parametr pojawia się rodzaj silnika. Tutaj mamy do czynienia z silnikiem trójfazowym, gdzie mówi nam o tym znak 3~ .
2 - Typ silnika
Przy oznaczeniu typu silnika proponujemy zajrzeć do karty katalogowej silnika, ponieważ producenci potrafią używać oznaczeń własnych. Doskonały przykład został przedstawiony na pokazanej wcześniej tabliczce znamionowej. Po zajrzeniu do karty silnika możemy dowiedzieć się, że tak są oznaczane serie silników o mocy mniejszej niż 0,75KW.
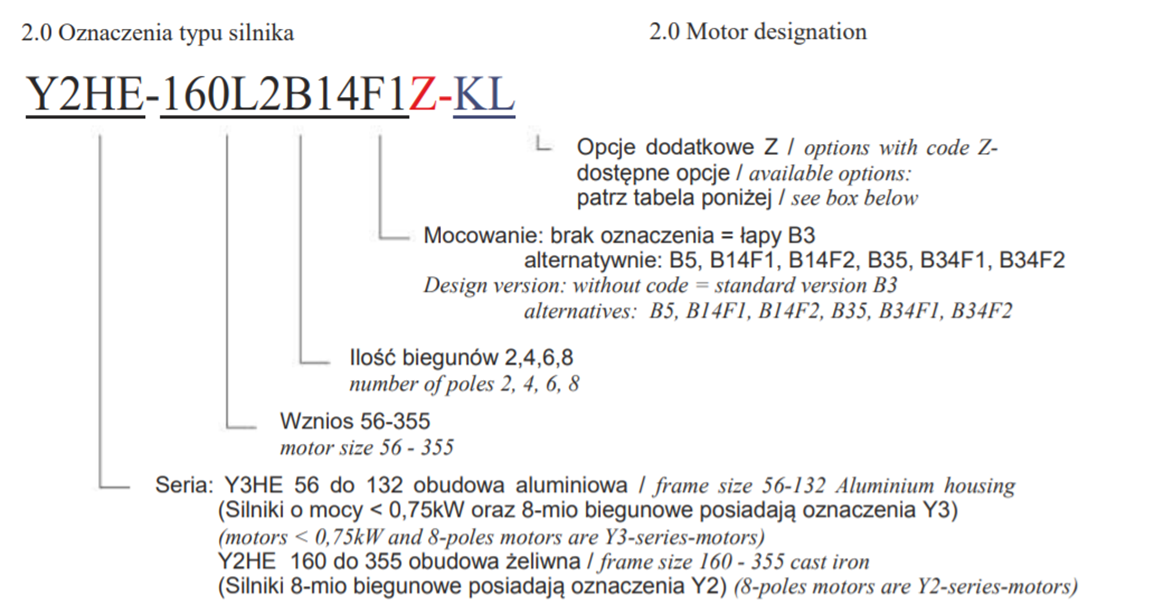
Przy tym typie oznaczenia możemy spotkać się z szeregiem liter oraz cyfr. Poniżej zostały przedstawione przykładowe znaczniki wraz z wyjaśnieniami:
- Ex – Jeśli silnik przeznaczony jest do pracy w strefach zagrożonych wybuchem, na samym początku zostanie umieszczony znacznik „Ex”. Oznacza to, że silnik posiada obudowę przeciwwybuchową;
- S – silnik indukcyjny. Jeśli przez literą „S” znajdzie się litera „F” będzie to oznaczać, że silnik nie jest wyposażony we własną wentylację.
- K – silnik kołnierzowy;
- L - silnik kołnierzowy na łapach;
- g lub h (małe litery, różne w zależności od producenta) – seria produkcyjna silnika.
- 80 – Po literze, która opisuje serię silników znajdzie się liczba mówiąca o wznosie wału, czyli wysokości od podłoża do środka wału w mm.
- S lub M lub L – rozmiar obudowy, znajduje się za informacją o wzniosie.
- – 4 – informacja o liczbie biegunów uzwojenia (2, 4, 6, 8). Może wystąpić po myślniku lub bez. LICZBA BIEGUNÓW ≠ LICZNA PAR BIEGUNÓW. Jeśli mamy 4 bieguny, to liczba par biegunów jest równa 2p.
- A – Duża litera oznaczająca długość stojana – A, B, C, D, gdzie A oznacza najkrótszy a D najdłuższy.
- 1 – Rozmiar kołnierza (tylko w przypadku silników kołnierzowych – K, L) – im wyższa cyfra tym mniejszy kołnierz, brak cyfry dla silników kołnierzowych oznacza duży kołnierz.
Można spotkać się z dodatkowymi oznaczeniami mówiącymi np. o hamowaniu silnika. Takie informacje są zawarte w karcie katalogowej silnika lub instrukcji użytkownika.
3 - Sposób mocowania stojana oraz silnika
Poprzez oznaczenie Bx, gdzie x to pewna liczba, oznacza się sposób mocowania silnika oraz stojana. Jeśli silnik nie posiada takiej informacji przyjmuje się, że ma on domyślne oznaczenie B3. Głównie spotkamy się tu z oznaczeniem:
- B3 - mocowanie stojana: na łapach; mocowanie silnika: do korpusu;
- B3/B5 – mocowanie stojana: na łapach; mocowanie silnika: do korpusu na dodatkowych uchwytach;
- B3/B14 - mocowanie stojana: na łapach; mocowanie silnika: do korpusu na dodatkowych uchwytach;
- B5 - mocowanie stojana: kołnierzowe; mocowanie silnika: na stanowisku, swobodnie oraz do dekla;
- B6 - mocowanie stojana: na łapach; mocowanie silnika: do ściany (można przymocować silnik w pionie).
4 - Temperatura pracy
Ten parametr oznacza maksymalną temperaturę otoczenia pracy dla silnika. Jeśli nie jest ona podana przyjmuje się 40⁰C.
5 - Numer seryjny
Numer seryjny producenta, który jest istotny np. podczas procesu gwarancyjnego.
6 - Klasa izolacji
Informuje nas o rodzaju zastosowanych materiałów izolacyjnych. Przekroczenie jej podczas pracy ciągłej skutkuje skróceniem żywotności oraz czasu bezawaryjnej pracy silnika. Klasa izolacji oznaczana jest literowo, a głównie spotkamy się z symbolami:
- A – temperatura pracy do 105°C.
- E – temperatura pracy do 120°C.
- B – temperatura pracy do 130°C.
- F – temperatura pracy do 155°C.
- H – temperatura pracy do 180°C.
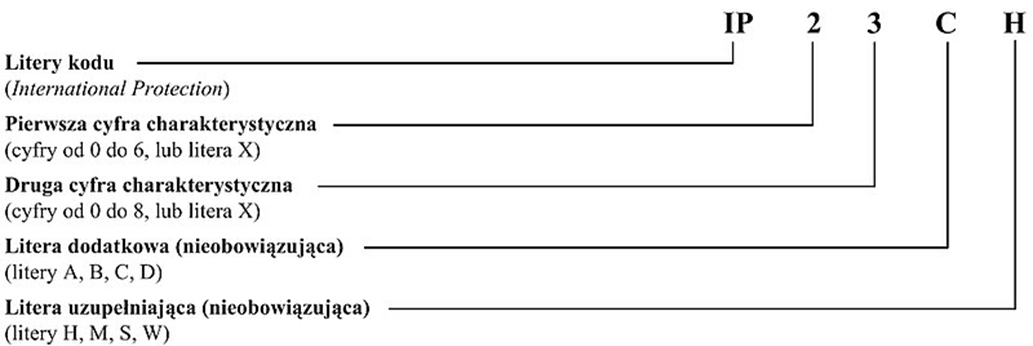
7 -Stopień ochrony
Stopień ochrony zapewnianej przez obudowę urządzenia elektrycznego chroniący przed: dostępem do niebezpiecznych części wewnątrz obudowy, wnikaniem obcych ciał stałych, szkodliwymi skutkami wnikania wody. Stopień ochrony nadawany jest według normy PN-EN 60529:2003. Oznaczania składają się z liter IP, a następnie 2 cyfr. Dodatkowo mogą wystąpić na końcu 2 litery.
8- Rodzaj pracy
Rodzaj pracy jest dosyć istotny przy doborze silnika do aplikacji. Mówi nam o tym czy silnik może pracować 24h na dobę 7 dni w tygodniu czy potrzebuje przerwy.
- S1 – Praca ciągła.
- S2 – Praca dorywcza.
- S3 – Praca okresowa przerywana.
- S4 – Praca okresowa przerywana z rozruchem.
- S5 – Praca okresowa przerywana z hamowaniem elektrycznym.
- S6 – Praca okresowa długotrwała z przerwami jałowymi.
- S7 – Praca okresowa długotrwała z hamowaniem elektrycznym.
- S8 – Praca okresowa długotrwała ze zmianami prędkości obrotowej.
9 - Normy i dyrektywy
Informacja na temat norm i dyrektyw, które spełnia silnik.
10 - Częstotliwość znamionowa
Znamionowa częstotliwość napięcia, do którego może zostać podłączony silnik. W naszej przykładowej tabliczce znamionowej można zauważyć, że silnik może zostać podłączony do sieci o częstotliwości 50Hz jak i 60Hz. Należy pamiętać, że dla różnych częstotliwości kolejne parametry tj. moc, prąd czy obroty znamionowe ulegają zmianie.
11 - Moc silnika
Znamionowa moc czynna silnika wyrażona w kW. Jest to siła użyteczna, która oddawana jest na wał silnika. Jest ona istota podczas doboru przemiennika częstotliwości do aplikacji.
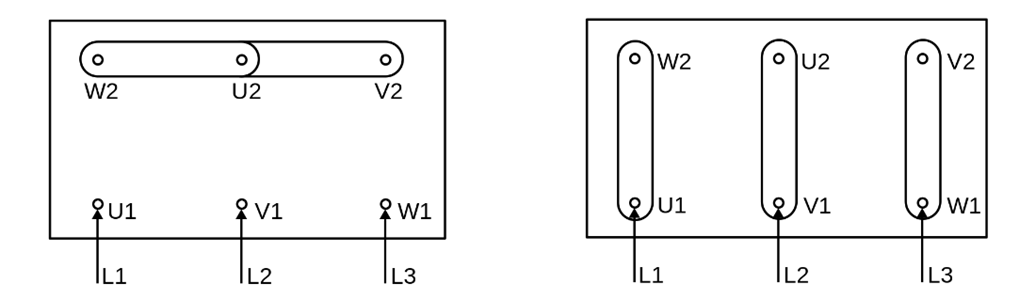
12 - Napięcie znamionowe
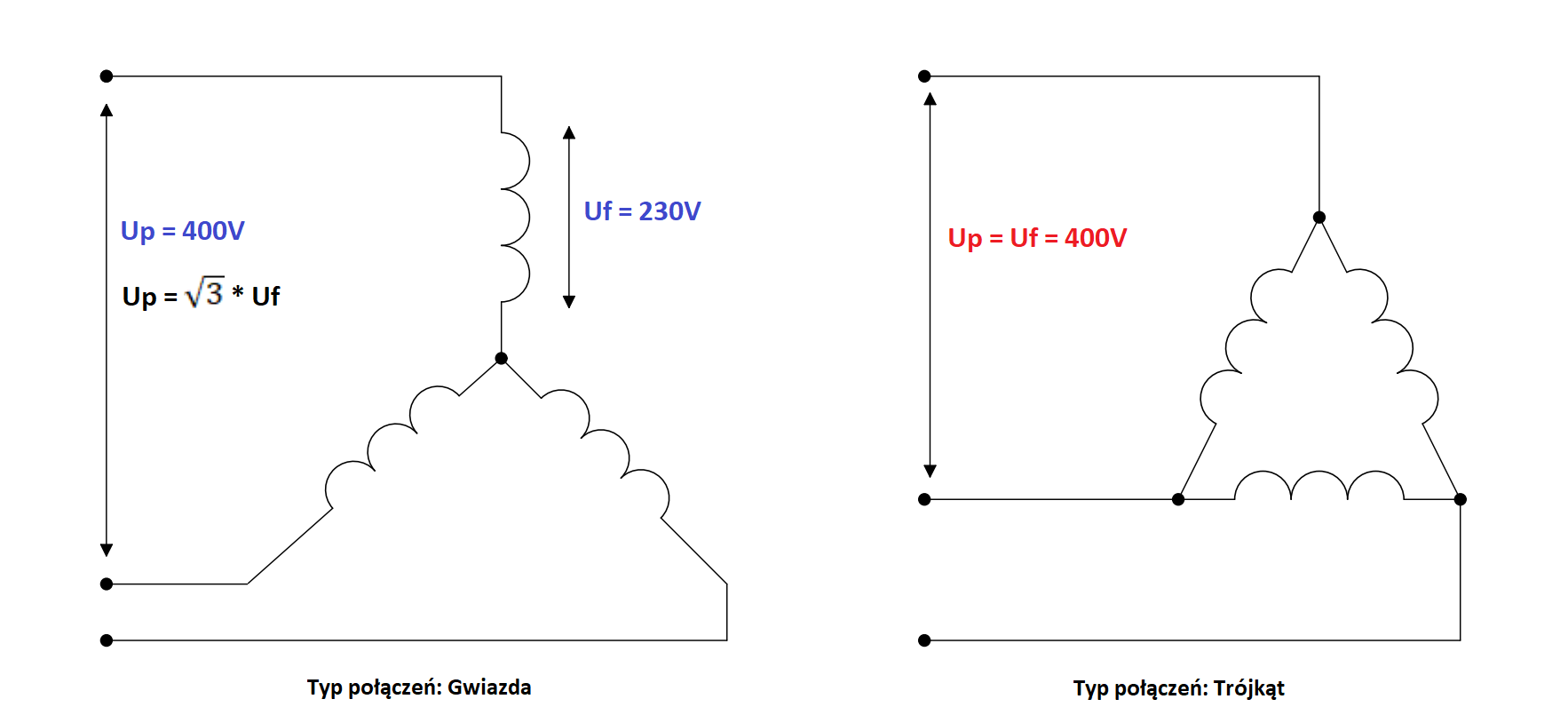
Jest to napięcie jakie możemy podać na silnik. W tym przypadku silnik możemy zasilić napięciem z zakresu 220-230V i 380-420V dla częstotliwości 50Hz lub 255-275V i 440-480V dla częstotliwości 60Hz.
Przy każdym zakresie napięcia występuje oznaczenie w jaki sposób należy połączyć uzwojenia silnika – czy to będzie gwiazda (Y), czy trójkąt (Δ). Poniżej zostały przedstawiony schemat połączenia gwiazda-trójkąt oraz praktyczna realizacja.
13 - Prąd znamionowy
Prąd silnika jest to wartość prądu pobieranego z sieci i płynącego w przewodach łączących siec z zaciskami silnika.
Wartość prądu różni się on w zależności od sposobu uzwojenia silnika. W naszym przykładzie dla częstotliwości napięcia 50Hz i wartości napięcia w zakresie 220-240V (połączenie w trójkąt) będzie on wynosił 2.56A, a dla napięcia w zakresie 380-420V (połączenie w gwiazdę) prąd będzie równy 1.47A.
14 - Prędkość obrotowa znamionowa
Do grupy najważniejszych parametrów silnika zaliczamy prędkość obrotową. Jest to ilość pełnych obrotów w ciągu 1 minuty. Szybkość obrotowa jest zależna od kilku parametrów: liczby biegunów, częstotliwości napięcia zasilania oraz sprawności.
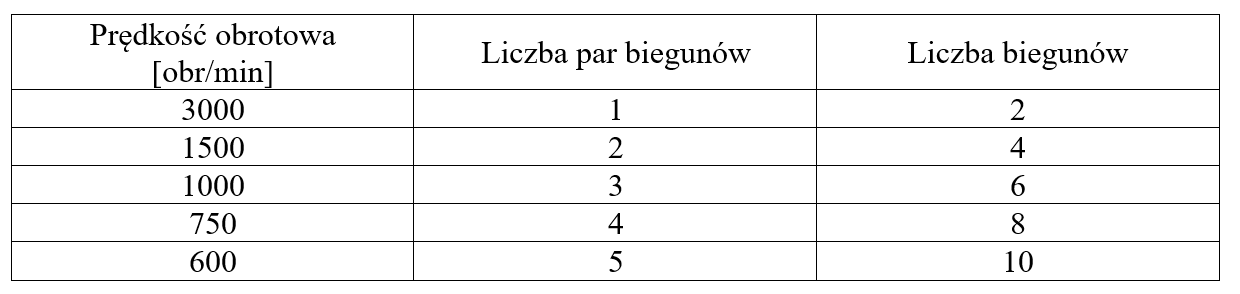
Po odczytaniu wartości prędkości obrotowej dla danej częstotliwości możemy dowiedzieć się, ile par biegunów posiada silnik. Im niższa szybkość obrotowa tym większa liczba par biegunów.
Poniżej dostępna tabela z prędkościami obrotowymi pola magnetycznego, który zależy od liczby par biegunów dla częstotliwości napięcia 50Hz. Prędkość obrotowa znamionowa różni się od tej z tabeli o wartość poślizgu. Definicja poślizgu zostanie wytłumaczona w dalszej części.
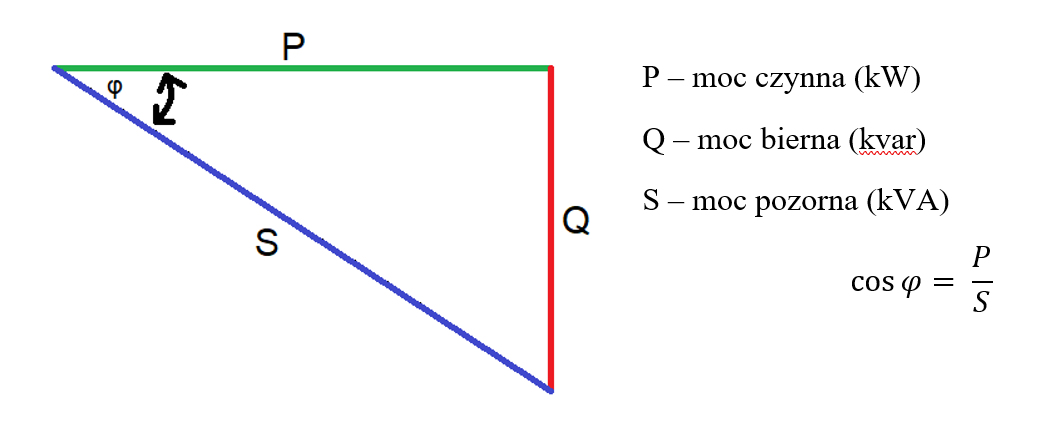
15 - Współczynnik mocy
Współczynnik mocy oznaczany jako cosφ wyraża stosunek mocy czynnej, czyli takiej, która faktycznie wykonuje pracę do mocy pozornej (suma geometryczna mocy czynnej i biernej). Moc bierna jest to moc potrzebna do wytworzenia prądy wzbudzającego lub magnesującego. Wszystkie te współczynniki wylicza się przy pomocy trójkąta mocy w obwodach prądu stałego.
16 - Sprawność
Nie jest podawana na każdym silniku, ponieważ bardzo łatwo jest ją obliczyć ze wzoru. Współczynnik ten pokazuje w jakim stopniu pobierana energia elektryczna jest przekształcana na energię mechaniczną.
Sprawność można wyliczyć ze wzoru:
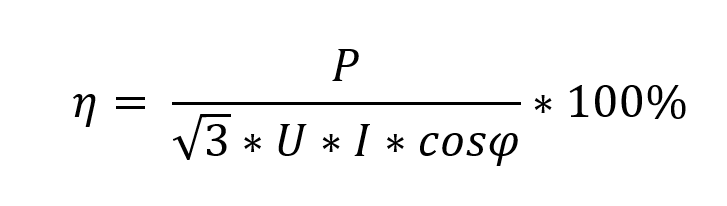
Gdzie:
- P – moc na wale;
- U – napięcie zasilania
- I – pobierany prąd
- Cosφ – współczynnik mocy
Inne parametry silnika
Poślizg
Podczas pracy silnika prędkość wirowania wirnika jest niższa niż szybkość wirującego pola magnetycznego. Poślizg wyznacza właśnie tą różnicę. Szybkość wirującego pola magnetycznego obliczymy ze wzoru:
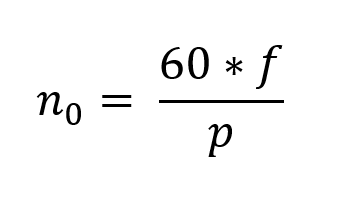
Gdzie:
- f - częstotliwość napięcia znamionowego silnika
- p – liczba par biegunów
Odczytując wartość prędkości znamionowej silnika z tabliczki jesteśmy w stanie obliczyć wartość poślizgu. Dla przykładu weźmy wartość n = 1380 obr/min.
Dla tego samego silnika n0 = 1500 obr/min. Poślizg obliczymy ze wzoru:
Po podstawieniu danych wartość poślizgu znamionowego jest równa s = 0.08. Poślizg można wyrazić również w obrotach/min.

Poślizg zależy od obciążenia założonego na wał silnika. Im ono jest większe tym wartość poślizgu będzie coraz większa. Poślizg zostanie osiągnięty w momencie założenia na wał jego maksymalnego obciążenia znamionowego. Wtedy również wartość pobieranego prądu i prędkość obrotowa osiągną wartość znamionową.
Moment znamionowy
Również na podstawie danych z tabliczki znamionowej jesteśmy w stanie określić moment znamionowy silnika, czyli możemy poznać wartość znamionową wydajności wału.
Moment obliczamy ze wzoru:
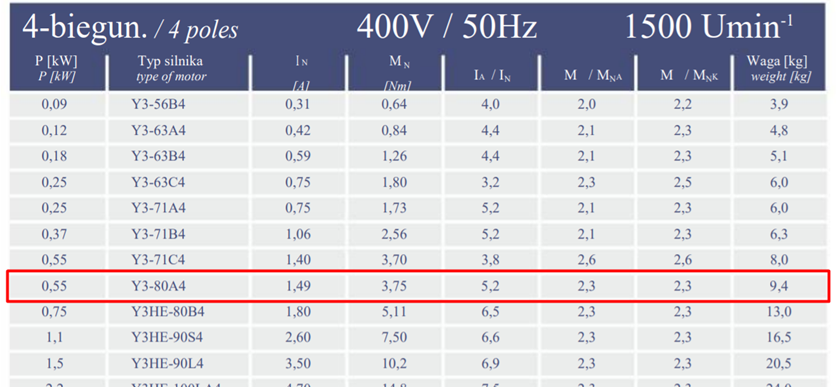
Wskazówka!
Nie musimy wyliczać niektórych zmiennych. Wszystkie niezbędne zmienne są podane w instrukcji użytkownika. Z tej tabeli możemy odczytać takie parametry jak:
- Prąd znamionowy IN
- Moment znamionowy MN
- Wartość współczynnika prądu znamionowego IN do prądu rozruchowego IA
- Wartość współczynnika momentu znamionowego MN do momentu rozruchowego MA
- Wartość współczynnika momentu rozruchowego M do maksymalnej wartości momentu MNK
Podsumowanie
Czytając i rozumiejąc parametry posiadanego silnika elektrycznego jesteśmy w stanie bardzo dużo stwierdzić na jego temat. Taka wiedza jest niezwykle przydatna przy sterowaniu takim silnikiem przy pomocy przemiennika częstotliwości. Zmniejszymy ryzyko uszkodzenia maszyny ale także przy odpowiednich nastawach sprawimy, że będzie on bardzo wydajny.
Masz pytania? Może potrzebujesz pomocy przy doborze przmiennika częstotliwości do posiadanego silnika? Skorzystaj z naszych wcześniejszych artykułów:
- Jak dobrać przemiennik częstotliwości do swojej aplikacji?
- Sposoby rozruchu silników i zalety stosowania przemienników częstotliwości
lub skontaktuj się z doradcami Unitronics: sterowniki@elmark.com.pl.
Powrót do Akademii falowników Unitronics
Więcej na temat





Skontaktuj się ze specjalistą Elmark
Masz pytania? Potrzebujesz porady? Zadzwoń lub napisz do nas!


















{kind=link}
{kind=link}
{kind=link}
{kind=link}