
Regulator PID jest już pewnym standardem w rynku przemienników częstotliwości. Ten sposób sterowania jest najbardziej spotykany w aplikacjach wodnych, np. utrzymywania stałego ciśnienia, oraz aplikacjach wentylacyjno-temperaturowych, np. gdzie wentylator ma za zadanie chłodzić pomieszczenie. Dzięki wbudowanemu regulatorowi PID w falowniku nie potrzebujemy oddzielnego urządzenia do sterowania prostymi procesami.
Z tego artykułu dowiesz się:
- Regulator PID co to jest?
- Algorytm regulacji PID
- Dlaczego spotykamy regulator PID w falownikach?
- Jak uruchomić podstawowy regulator PID w falowniku?
- a. Włączenie regulatora PID
- b. Określenie trybu działania regulatora PID
- c. Źródło wartości zadanej regulatora PID i skalowanie
- d. Limity regulatora PID i poziomy alarmów
- e. Ustawienia członów regulatora PID
- f. Uśpienie i wybudzenie falownika
- g: Utrata sygnału sprzężenia zwrotnego regulacji PID
- h: pre-PID, czyli podbij obroty przed rozpoczęciem regulacji
- Podsumowanie
Regulator PID co to jest?
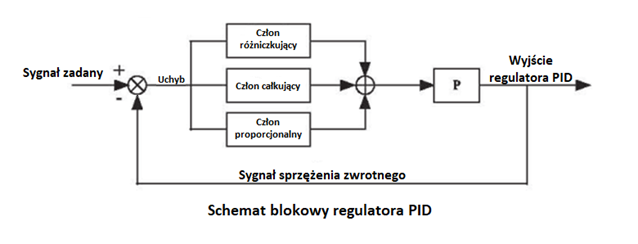
Regulator PID, czyli regulator proporcjonalno-całkująco-różniczkujący. Jego celem jest utrzymanie wartości wyjściowej PID na stałym, zadanym poziomie lub podążanie za wartością zadaną. Regulator PID pracuje w pętli sprzężenia zwrotnego. Oznacza to, że oblicza wartość uchybu jako różnicę między wartością zadaną i zmierzoną i wysteruje wyjście tak, aby zredukować ten uchyb do 0.
Algorytm regulacji PID
Algorytm regulacji PID opiera się na 3 członach:
-
Proporcjonalnym (P) o wzmocnieniu Kp, który kompensuje bieżący uchyb;
-
Całkującym (I) o czasie zdwojenia (całkowania) Ti, który kompensuje akumulację uchybów z przeszłości;
-
Różniczkującym (D) o czasie wyprzedzenia (różniczkowania) Td, który kompensuje przewidywaną wartość uchybu w przyszłości.
Dlaczego spotykamy regulator PID w falownikach?
Najważniejszym zadaniem falownika jest zmniejszenie prędkości obrotowej silnika elektrycznego i taki był też cel powstania takiego urządzenia. Zaraz po tym mamy możliwość zmiany prędkości, sterowanie momentem, zabezpieczenia itd. Zaimplementowany PID po prostu … wiele ułatwia! Nie musimy posiadać dodatkowych sterowników, zewnętrznych regulatorów. Odchodzi nam dodatkowe ciągnięcie przewodów sterujących.
Wbudowany regulator PID w przemienniku częstotliwości również dostarcza dodatkowe funkcjonalności i zabezpieczenia, np. funkcja uśpienia czy pre-PID.
Jak uruchomić podstawowy regulator PID w falowniku?
Teraz uruchomimy regulator PID w podstawowej wersji na przykładzie najprostszego falownika Elmatic EL1000. W pierwszej kolejności należy uruchomić funkcję regulatora PID ustawiając wartość 8 w parametrze P101. Teraz możemy przejść do samego regulatora.
a. Włączenie regulatora PID
Parametry regulatora PID ustawiamy w grupie P6xx. Znajdziemy tu również poziomy zabezpieczeń działania regulatora, funkcje uśpienia i wybudzenia. Sam tryb PID falownika uruchamiamy w parametrze P600 i mamy do wyboru:
-
0 – Uruchomienie regulatora w parametrze P101 = 8, co też już zrobiliśmy;
-
1 – Włączenie regulatora poprzez ustawienie tego parametru na 1
-
2 – Wyzwalanie regulatora wejściem cyfrowym
b. Określenie trybu działania regulatora PID
Następnie wybieramy tryb działania regulatora w parametrze P601. Ustawienie wartości 0 sprawdza się w np. regulacji ciśnienia przepływu. Kiedy sygnał zwrotny z czujnika będzie wzrastał wskazując na wysokie ciśnienie, pompa będzie zwalniała obroty, a kiedy sygnał będzie maleć – pompa będzie przyspieszać. Wybranie wartości 1 w P601 spowoduje odwrócenie działania, co idealnie sprawdzi się w wszelkich aplikacjach klimatyzacyjno-wentylatorowych. Wzrost temperatury będzie sprawiał, że obroty wentylatora będą się zwiększać w celu schłodzenia pomieszczenia, a jeśli temperatura spadnie to obroty również.
Dalej będziemy rozpatrywać przykład wentylatora, czyli P601 ustawiam na wartość 1.
c. Źródło wartości zadanej regulatora PID i skalowanie
Przechodzimy do wartości zadanej. W pierwszej kolejności wybieramy jej źródło w parametrze P602. W EL1000 mamy tylko 1 wejście analogowe, a na nie będzie będziemy zadawać wartość sprzężenia zwrotnego. Z tego powodu wartość zadana będzie podawana ręcznie w parametrze P604 (P602=0). Tą wartość możemy przeskalować w parametrze P614. Ustawiam w pierwszej kolejności P614 na 50.00, a wartość zadaną w P604 ustawiam na 25.00.
d. Limity regulatora PID i poziomy alarmów
W następnej kolejności ustawiamy górny i dolny limit sygnału PID. Parametry P605 i P606 określają również alarmy HP (wysokiego ciśnienia) oraz LP (niskiego ciśnienia). Parametry te są skalowane wraz ze zmianą parametru P614.
e. Ustawienia członów regulatora PID
Kolejne 3 parametry odpowiadają ustawieniom wartości członów regulatora PID:
- P607 - Człon proporcjonalny (wzmocnienie Kp);
- P608 - Człon całkujący (czas całkowania Ti);
- P609 - Człon różniczkujący (czas różniczkowania Td).
Domyślnie mamy włączony człon P i I. W większości przypadków człon D nie jest potrzebny przy regulacji.
f. Uśpienie i wybudzenie falownika
Funkcja uśpienia i wybudzenia przemiennika częstotliwości w aplikacjach wentylatorowych i pompowych pozwalają na zaoszczędzenie energii elektrycznej. Jaki jest sens pracy urządzeń jeśli temperatura w pomieszczeniu utrzymuje się na stałym poziomie? Praca wentylatora jest wtedy bezsensowna.
W P611 ustawiamy wartość częstotliwości uśpienia, a w P612 ustawiamy czas uśpienia. Jeśli podczas regulacji częstotliwość pracy przemiennika będzie równa lub mniejsza częstotliwości uśpienia przez czas P612, przemiennik przejdzie w tryb sleep i wyświetli komunikat SLP.
Przemiennik wróci do pracy po osiągnięciu wartości wzbudzenia PID, którą ustawiamy w P613.
g: Utrata sygnału sprzężenia zwrotnego regulacji PID
Jedna z najważniejszych informacji o błędzie podczas regulacji. Dobrze jest wiedzieć, czy przemiennik pracuje na maksymalnych obrotach dlatego, że jest zbyt gorąco czy dlatego, że ktoś wypiął kabel sygnałowy.
W parametrze P621 musimy uruchomić tą funkcję, ponieważ domyślnie jest ona wyłączona. Ustawiamy akcję, jaką falownik ma wykonać w momencie utraty sygnału:
- Wartość 1 – wyświetlenie błędu „20” i dalsza praca.
- Wartość 2 – wyświetlenie błędu „20” i zatrzymanie pracy
W następnym parametrze P622 ustawiamy czas po jakim przemiennik ma wykryć utratę sygnału.
h: pre-PID, czyli podbij obroty przed rozpoczęciem regulacji
W przypadku aplikacji, gdzie będziemy potrzebowali podbić obroty silnika przed rozpoczęciem regulacji (np. kompresory) warto wykorzystać funkcję pre-PID.
W P636 ustawiamy procentowo wartość częstotliwości, z jaką ma pracować przemiennik przed rozpoczęciem regulacji. Wartość 0.0% wyłącza funkcję. 100.0% odpowiada ustawionej górnej granicy częstotliwości pracy przemiennika.
W parametrze P637 ustawiamy czas utrzymywania częstotliwości z parametru P636. Po odliczeniu tego czasu przemiennik rozpocznie standardową regulację PID.
Podsumowanie
Przedstawione funkcje pokazują podstawową konfigurację regulatora PID na przykładzie falownika EL1000. W takiej formie każdą mało skomplikowaną aplikację przygotujemy do poprawnego działania.
Z dodatkowych parametrów PID, które jeszcze możemy ustawić to np. inne wartości członów regulatora od danej częstotliwości, funkcja przeciw zamarzaniu, funkcja wykrycia braku wody. A to są ustawienia, które dostajemy już w najprostszym przemienniku skalarnym. A im bardziej zaawansowany falownik tym dostępność tych funkcji rośnie.





















