

Z poniższego wpisu dowiesz się, jak proste jest połączenie robota z PLC, oraz jak wykorzystać sterownik do komunikacji kilku urządzeń, działających tylko jako EtherNet/IP Adapter.
Czasami zdarza się, że musimy skomunikować pewne urządzenie zewnętrzne z robotem. Coboty Universal Robots wspierają komunikację Modbus TCP Client/Server, PROFINET IO-Device, oraz EtherNet/IP Adapter. A co w przypadku, gdy chcemy połączyć dwa urządzenia, które wspierają tylko EtherNet/IP Adapter? W tym krótkim artykule pokażę Ci, jak połączyć dwa roboty UR3e (lub inne urządzenia) przy pomocy sterownika Unitronics US5-B5-B1.
Konfiguracja robota:
Pierwszym krokiem jest poprawne ustawienie sieci w robocie. Można to zrobić przechodząc do Menu Hamburger -> System -> Sieć. Należy ustawić parametry tak, aby wszystkie urządzenia znajdowały się w jednej podsieci.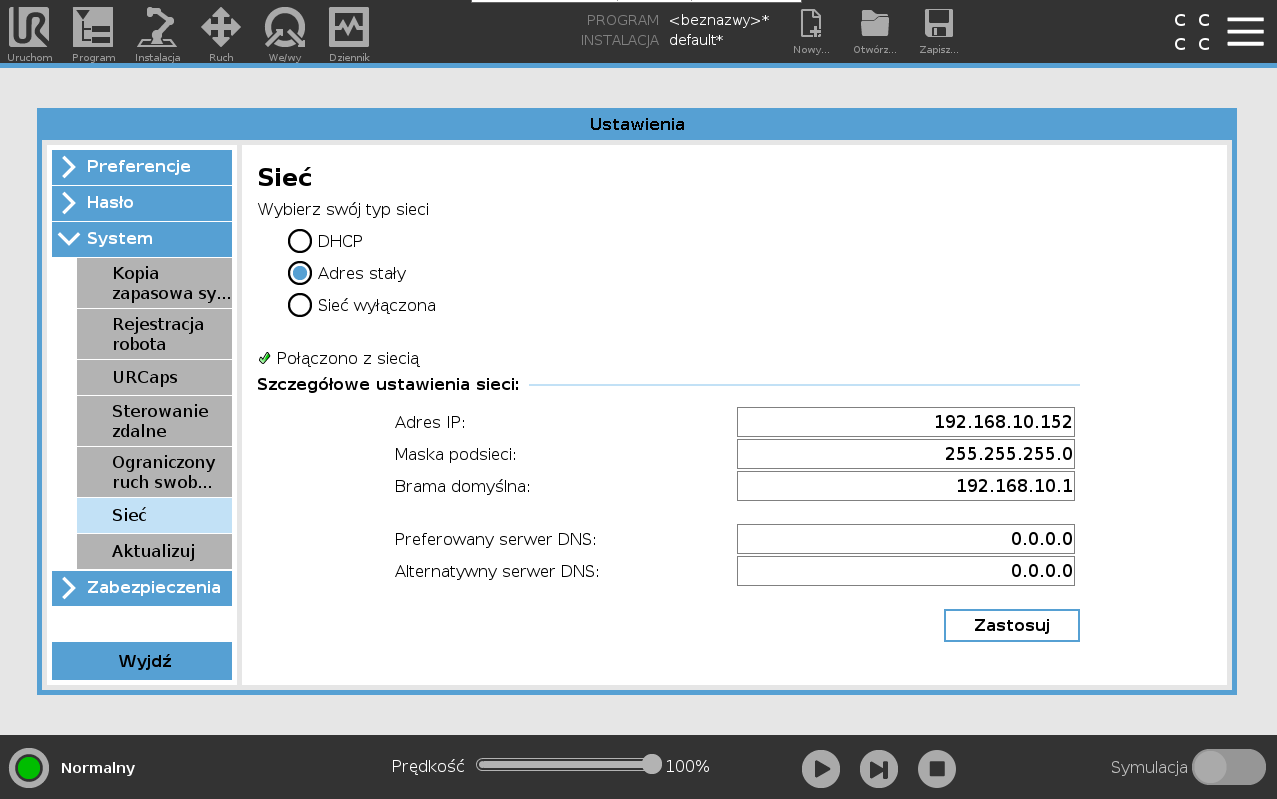
Rysunek nr 1. Ustawienia sieciowe robota.
Następnym krokiem jest włączenie komunikacji EtherNet/IP w robocie. Przechodzimy do zakładki Instalacja -> Fieldbus -> EtherNet/IP. Po kliknięciu opcji „Włącz”, dioda powinna zmienić kolor na żółty, co sygnalizuje włączenie funkcji. Poprawne podłączenie robota do EtherNet/IP Scannera powinno poskutkować zmianą koloru diody na zielony.
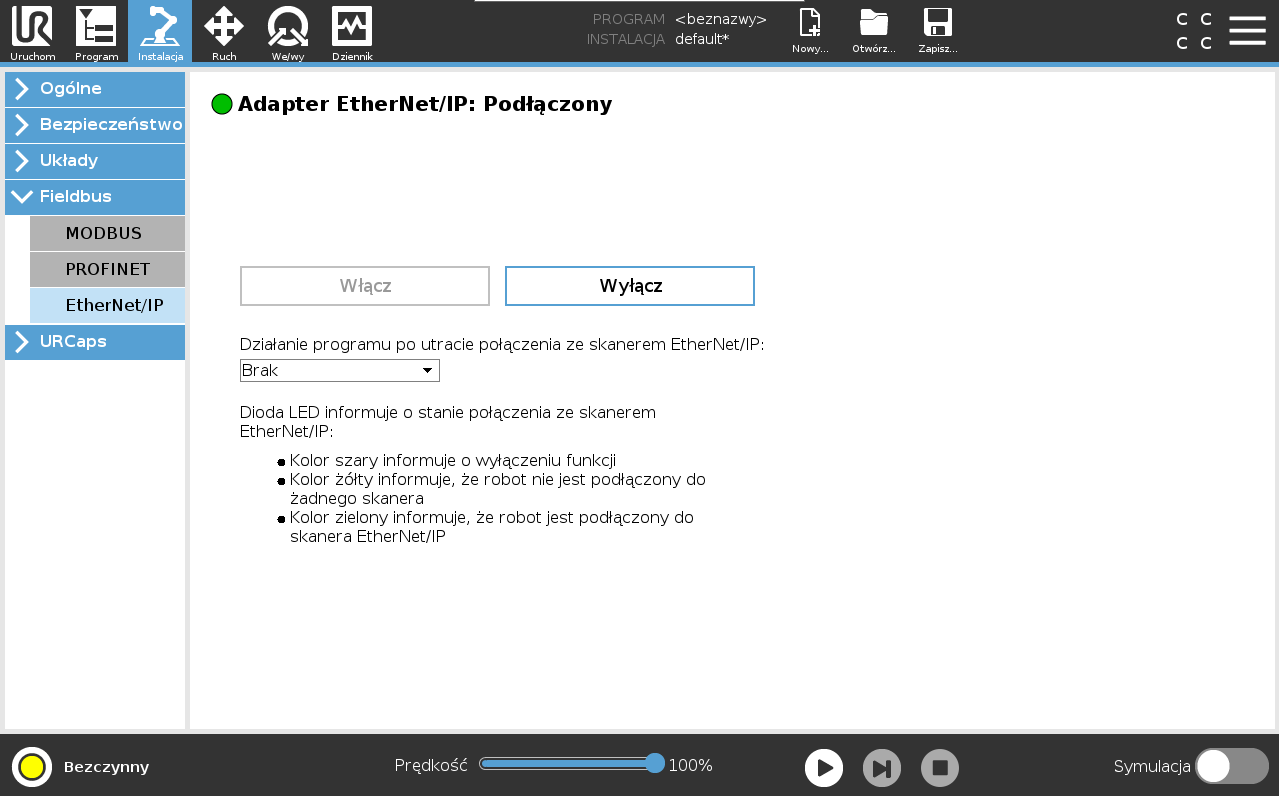 Rysunek nr 2. Zielona dioda sygnalizuje połączenie z EtherNet/IP Scannerem.
Rysunek nr 2. Zielona dioda sygnalizuje połączenie z EtherNet/IP Scannerem.
Konfiguracja sterownika:
Pierwszym krokiem powinno być nadanie poprawnego adresu IP sterownikowi (Project -> PLC Communications -> Physical -> CPU Ethernet)
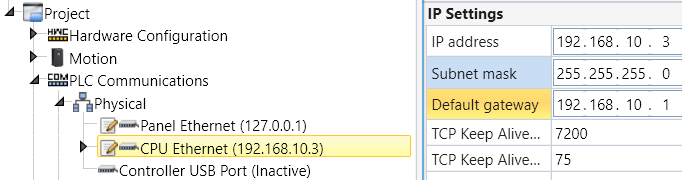
Rysunek nr 3. Nadanie adresu IP sterownikowi.
Następnie możemy dodać parametry urządzenia Ethernet Adapter, przechodząc do Project -> PLC Communications -> Protocols -> EtherNet/IP -> Scanner. W przypadku cobotów Universal Robots posłużymy się plikiem EDS, który można pobrać bezpośrednio ze strony producenta. Po ich dodaniu możemy zmienić nazwy oraz adresy IP, na odpowiadające rzeczywistym urządzeniom. Konfiguracja innych urządzeń powinna wyglądać podobnie. W przypadku problemów, lub gdy interesują Cię bardziej zaawansowane ustawienia, zachęcamy do zapoznania się z artykułem Komunikacja EtherNet/IP w Unitronics.
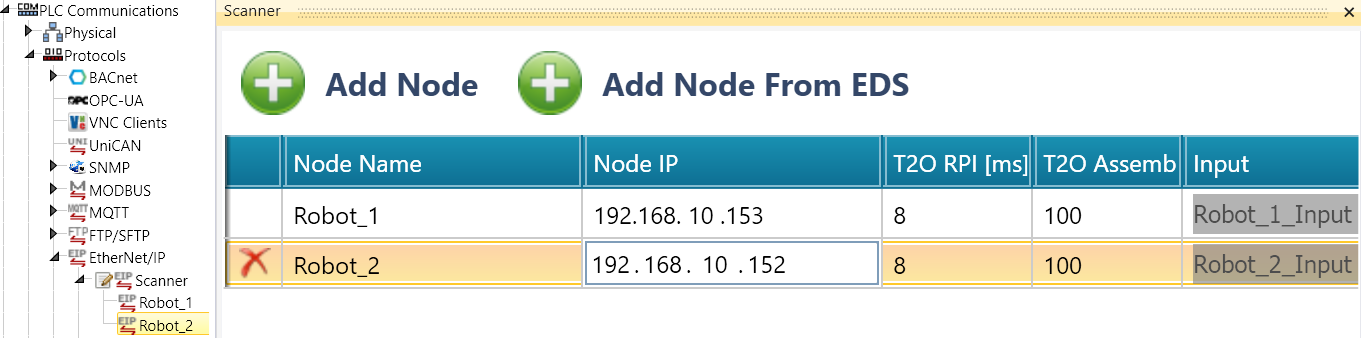
Rysunek nr 4. Konfiguracja dodawanych urządzeń.
W jaki sposób można wykorzystać komunikację:
Spróbujmy skomunikować ze sobą dwa roboty działające jako Adapter. Zacznijmy od nazwania rejestrów w PolyScope, aby można było ich łatwo używać w programie. Można to zrobić przechodząc do zakładki Instalacja -> Konfiguracja we/wy. Dodatkowo, możemy każdemu z wejść i wyjść przypisać dodatkową funkcję np. uruchamianie bądź wstrzymywanie programu.

Rysunek nr 5. Konfiguracja we/wy.
Nadanie nazwy rejestrom pozwala wybrać je z rozwijanej listy We/Wy w interfejsie graficznym oprogramowania PolyScope. Istnieją również funkcje skryptowe, które możemy wykorzystać w naszym programie do interakcji z innymi urządzeniami:
- read_input_boolean_register(adres rejestru)
- read_input_float_register(adres rejestru)
- read_input_integer_register(adres rejestru)
- read_output_boolean_register(adres rejestru)
- read_output_float_register(adres rejestru)
- read_output_integer_register(adres rejestru)
- write_output_boolean_register(adres rejestru, wartość)
- write_output_float_register(adres rejestru, wartość)
- write_output_integer_register(adres rejestru, wartość)
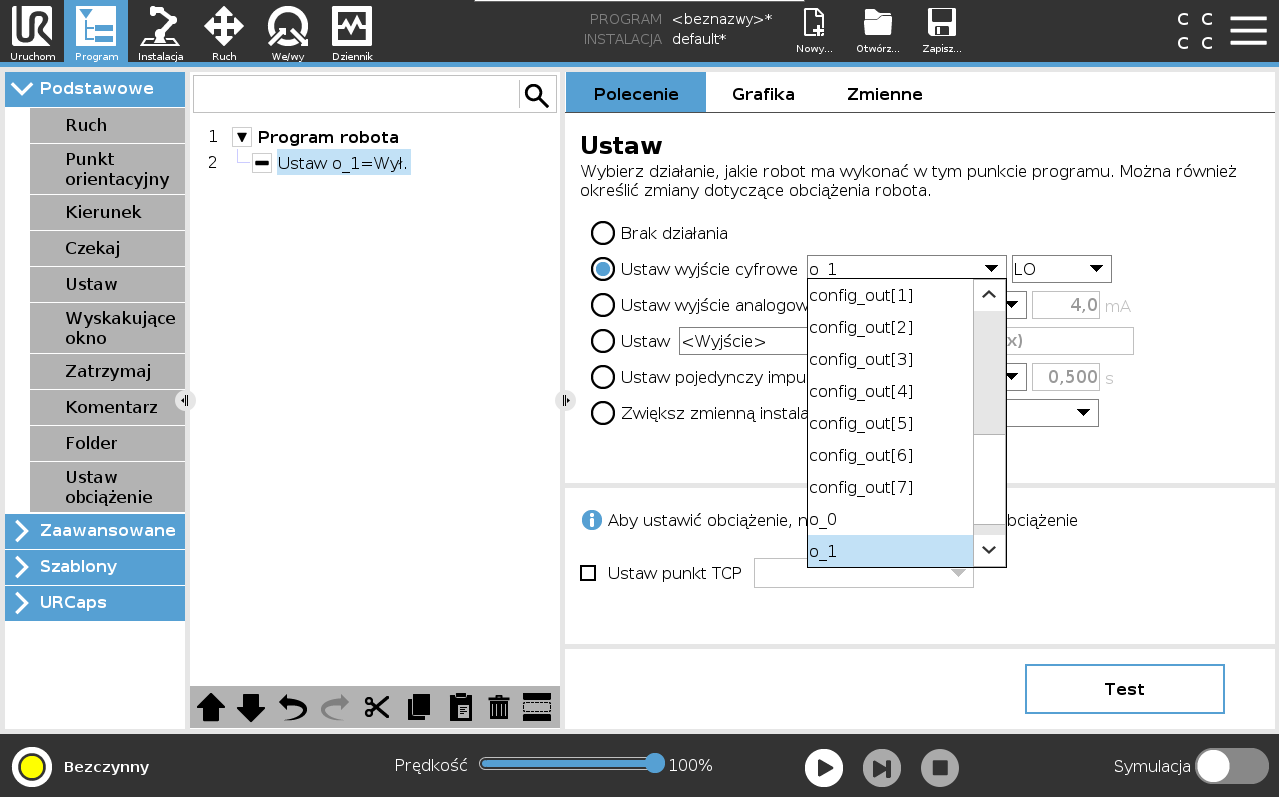
Rysunek nr 6. W węźle „ustaw" możemy wykorzystać rejestr wyjściowy, który wcześniej nazwaliśmy.
Przechodząc do sterownika, odpowiednich rejestrów możemy używać podczas pisania programów oraz tworzenia wizualizacji. Program UniLogic, po wpisaniu nazwy naszego urządzenia, podpowiada nam składnię, dzięki czemu korzystanie jest dużo prostsze. Oprócz rejestrów ogólnego użytku, mamy dostęp do rejestrów, których wartości w szczegółowy sposób opisują parametry, stan i działanie całego robota. Pełną tablicę wszystkich dostępnych rejestrów możesz znaleźć tutaj.
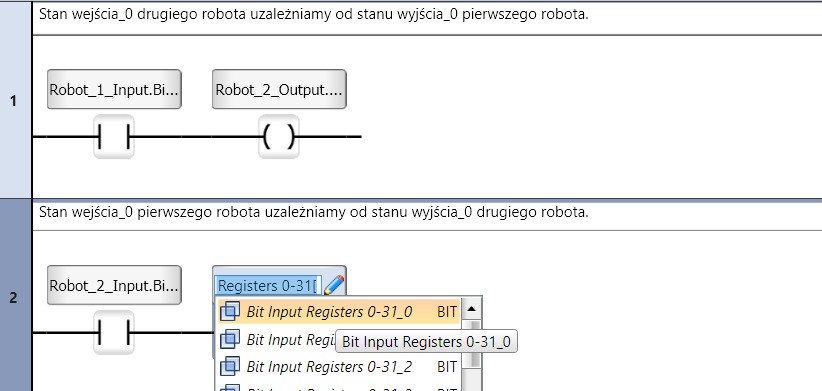
Rysunek nr 7. Przykład prostego programu, dzięki któremu komunikujemy ze sobą dwa roboty.

Rysunek nr 8. Wykorzystanie rejestrów zawierających pozycję TCP do tworzenia Panelu HMI.
Komunikacja z cobotem UR, jak pewnie zauważyłeś, nie jest trudna. Wymianę danych pomiędzy robotem a innymi urządzeniami można zaprogramować bez pisania linijki skryptu, korzystając jedynie z interfejsu graficznego. Jeżeli podczas konfiguracji komunikacji napotkałeś jakiś problem, lub masz pytanie dotyczące robotów Universal Robots, napisz do nas na adres roboty@elmark.com.pl.
![]()





















