W materiale została przedstawiona regulacja PID oraz konfiguracja regulatora PID w sterownikach PLC z serii UniStream.
Wstęp
Czy słowa sterowanie i regulacja oznaczają to samo? W potocznym języku przyjęło się używać tych słów zamiennie, co jednak nie jest dobrą praktyką. Z technicznego punktu widzenia jest między tymi dwoma pojęciami zasadnicza różnica. Sterowanie, w skrócie, jest to takie oddziaływanie na obiekt, aby przez użycie sygnałów wejściowych uzyskać określony efekt działania tegoż obiektu. Regulacja posiada natomiast dodatkowy element. Jest nim pętla sprzężenia zwrotnego. Pozwala ona na korekcje sygnału sterującego, na podstawie pomiaru efektu sterowania. Dzięki zastosowaniu pętli sprzężenia zwrotnego, regulacja jest procesem, którego wynik jest dużo bardziej dokładny oraz może być utrzymywany na stałym poziomie, stąd też regulacja jest procesem bardziej zaawansowanym. W niniejszym materiale, wspomniano krótko o regulacji PID oraz pokazano jak skonfigurować regulator PID przy użyciu sterowników PLC z serii UniStream
Regulacja PID – teoria
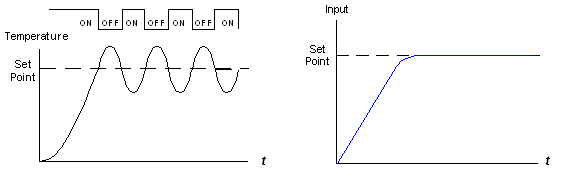
Działanie regulator PID jest oparte na trzech członach. Proporcjonalnym (P – Proportional), całkującym (I – Integral) i różniczkującym (D – Derivative). Sygnałem sterującym jest różnica między wartością zadaną (Set Point) a wartością rzeczywistą (Process Value). Odpowiedzią regulatora jest natomiast sygnał, będący kombinacją odpowiedzi z członów P, I oraz D.
Człon proporcjonalny odpowiada za przemnożenie wartości uchybu przez współczynnik proporcjonalności, w związku z tym na wyjściu otrzymujemy sygnał proporcjonalny do sygnału wejściowego. Jest to element pozbawiony inercji. Jest bezwładny, nie magazynuje energii oraz nie wprowadza opóźnień.
Człon całkujący jest elementem magazynującym energię sygnału wejściowego, stąd jego odpowiednikiem może być sprężyna (magazynuje energię mechaniczną) lub kondensator (magazynuje energię elektryczną). Jego zadaniem jest minimalizowanie wartości uchybu. Dzięki eliminacji wolnozmiennych zakłóceń, zastosowanie członu I pozwala na całkowite wyeliminowanie uchybu, co jest nieosiągalne w przypadku regulatorów P lub PD, nieposiadających członu całkującego.
Człon różniczkujący wpływa na czas regulacji. Poprzez pomiar przyrostu wartości rzeczywistej próbuje dopasować jego prędkość tak, aby nie spowodować przeregulowania. Jego zadaniem jest jak najszybsze doprowadzenie wartości rzeczywistej do poziomu wartości zadanej, a jego działanie objawia się wyłącznie przy zmianach wartości wejściowej.
Regulacja PID w sterownikach UniStream
Po otwarciu środowiska programistycznego UniLogic, należy przejść do modułu programowania Solution->Project->Ladder->Module1->Function1. W pasku z funkcjami po prawej stronie znajduje się zakładka PID. Po kliknięciu na nią rozwija się menu z dostępnymi funkcjami obsługującymi regulacje PID.
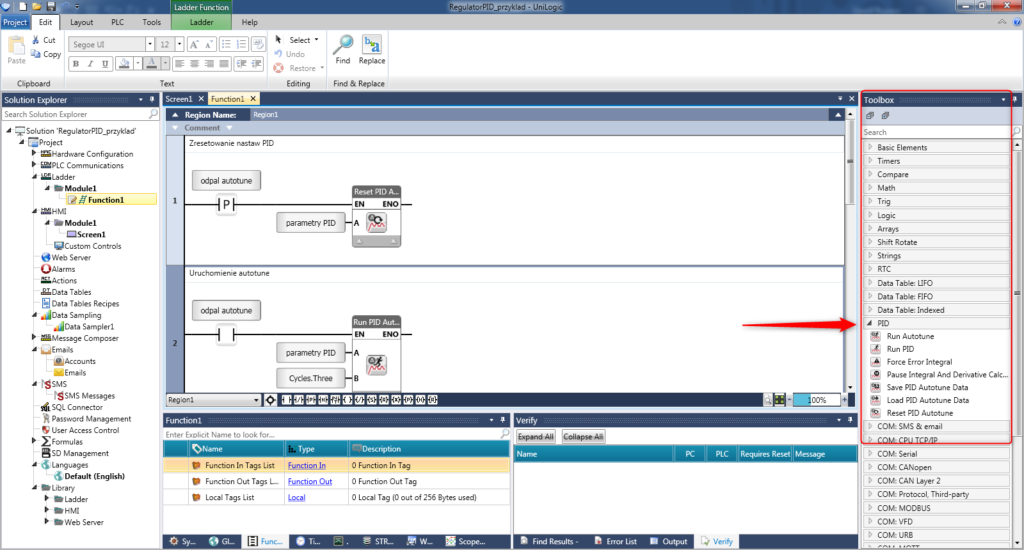
Funkcja Run Autotune odpowiada za uruchomienie procesu automatycznego doboru nastaw regulatora, które po procesie dostrajania są wpisywane do struktury danych PID Config. Aby przechowywać parametry tworzy się strukturę PID AT Params. W tej strukturze można zapisywać oraz pobierać z niej parametry regulacji, które następnie można wykorzystać w pętli PID. Każde uruchomienie procesu dostrajania powinno być poprzedzone resetem nastaw aktualnie zapisanych w tej strukturze, aby uniknąć niepełnego napisywania nastaw. W celu zresetowania wartości należy wykorzystać funkcję Reset PID Autotune. Należy wspomnieć, iż dobrym nawykiem programisty jest zresetowanie aktualnych ustawień regulatora PID zapisanych w strukturze danych PID Config przed uruchomieniem Autotune’a.
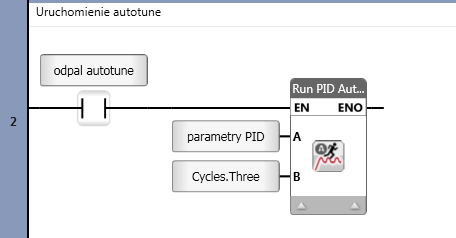
W przykładzie jak na rysunku powyżej, do parametru A w funkcji Run PID Autotune podano strukturę PID Config o nazwie parametry PID. Do tej struktury zapisywane są nastawy regulatora. Parametr B natomiast określa jak wiele cykli roboczych będzie trwał proces samoczynnego dostrajania.
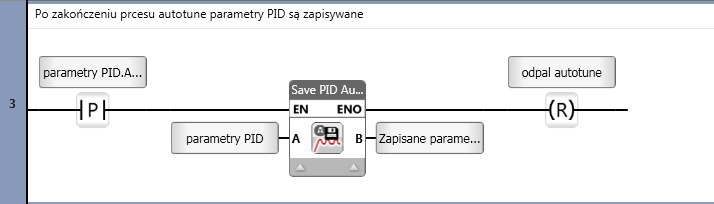
Po skutecznie przeprowadzonym procesie doboru nastaw , wartość bitu Autotune.Done w strukturze PID Config, zmieni swoją wartość na logiczną jedynkę. Można to wykorzystać do zapisania nastaw regulatora. Aby zapisać nastawy należy stworzyć fragment kodu jak na rysunku 4. Zapisywanie oraz ładowanie parametrów odbywa się z wykorzystaniem bloków Save PID Autotune Data oraz Load PID Autotune Data.
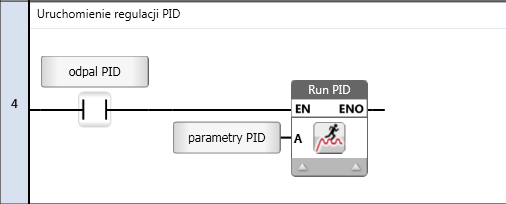
W celu uruchomienia pętli programowej PID należy do funkcji Run PID podpiąć strukturę PID Config. Struktura ta udostępnia parametry z nastawami dla regulatora. Aby sprawdzić jak powinien wyglądać ten fragment kodu, spójrz na rysunek 5.
Podsumowanie
Sterowniki PLC firmy Unitronics serii UniStream umożliwiają cyfrową regulację PID. Dzięki wykorzystaniu regulatora PID wartość wyjściowa jest utrzymywana na zadanym poziomie a wynik sterowania jest dokładniejszy. Dzięki możliwości przeprowadzenia autotunningu proces doboru nastaw jest prosty i szybki w obsłudze oraz nie wymaga żmudnego doświadczalnego dobierania nastaw lub przeprowadzania skomplikowanych obliczeniowo procesów. Parametry przechowywane są w strukturach danych PID Config oraz PID AT Params.
Przykładowy program z konfiguracją regulatora PID można pobrać klikając poniższy przycisk:






















