

Aby uzyskać dostęp do większej liczby lekcji, powróć na stronę startową kursu.
1. Wprowadzenie
W poprzednich instrukcjach omówiliśmy sterowanie serwonapędami za pomocą sterowników UniStream oraz Vision. Oczywiście kontrola ruchu przy użyciu dedykowanych sterowników poszerza znacząco funkcjonalność serwonapędu jak i upraszcza konfiguracje/programowanie, ale do wykonywania prostych profili ruchowych możemy użyć analogowego sterowania serwonapędem za pomocą wbudowanych wejść/wyjść.
Przed przystąpieniem do sterowania ręcznego niezbędne będzie odpowiednie złącze wejść/wyjść dostępne w akcesoriach serwonapędów. W zależności od wersji serwosterownika (CANopen/EtherCAT) będziemy używać terminalu UMD-ACC-TERM o 50 pinach (CANopen) lub 20 pinach (EtherCAT). Złącze pozwoli nam na analogowe zarządzanie prędkością lub momentem obrotowym, a także na wysyłanie i odbieranie wszelkich niezbędnych sygnałów z serwosterownika.
W naszym przykładzie użyjemy następującego zestawu:
- Serwosterownik UMD-0001B-B3,
- Serwosilnik UMM-0001BN-B4,
- Złącze UMD-ACC-TERM.
Poniżej schemat sygnałów w złączu CN1.
|
Nr |
Nazwa |
Funkcja |
Nr |
Nazwa |
Funkcja |
|
|
1 |
VREF+ |
Wejście prędkości odniesienia: ± 10 V. |
26 |
T-REF+ |
Wejście odniesienia momentu obrotowego: ± 10 V. |
|
|
2 |
VREF- |
27 |
T-REF- |
|||
|
3 |
DGND |
DGND |
28 |
DGND |
DGND |
|
|
4 |
— |
Zarezerwowany |
29 |
— |
Zarezerwowany |
|
|
5 |
/TGON+ |
Sygnał wejściowy |
30 |
PULS+ |
Referencyjne wejście impulsowe |
|
|
6 |
/TGON- |
31 |
PULS- |
|||
|
7 |
ALM+ |
Serwo alarm |
32 |
SIGN+ |
Wprowadzanie znaku odniesienia |
|
|
8 |
ALM- |
33 |
SIGN- |
|||
|
9 |
/S-RDY+ |
Serwo gotowe |
34 |
PPI |
Odwołanie do otwartego kolektora zasilacza |
|
|
10 |
/S-RDY- |
35 |
— |
Zarezerwowany |
||
|
11 |
/BK + |
Wyjście blokady hamulca |
36 |
— |
Zarezerwowany |
|
|
12 |
/BK - |
37 |
— |
Zarezerwowany |
||
|
13 |
DICOM |
*Sygnał referencyjny napięcia We/Wy |
38 |
— |
Zarezerwowany |
|
|
14 |
/S-ON |
Serwo włączone |
39 |
/ALM-RST |
Alarm reset |
|
|
15 |
/P-CON |
Wejście sterujące P/PI |
40 |
/CLR |
Błąd pozycjonowania wejścia impulsowego |
|
|
16 |
P-OT |
Obrót do przodu zabroniony |
41 |
/PCL |
Przedni limit momentu wejściowego |
|
|
17 |
N-OT |
Obrót do tyłu zabroniony |
42 |
/NCL |
Zamień ograniczenie momentu obrotowego |
|
|
18 |
— |
Zarezerwowany |
43 |
— |
Zarezerwowany |
|
|
19 |
— |
Zarezerwowany |
44 |
— |
Zarezerwowany |
|
|
20 |
PAO+ |
Podział PG wyjścia impulsowego fazy A |
Wyjście impulsowe dzielące PG |
45 |
— |
Zarezerwowany |
|
21 |
PAO- |
46 |
DGND |
DGND |
||
|
22 |
PBO+ |
Podział PG wyjścia impulsowego fazy B |
47 |
— |
Zarezerwowany |
|
|
23 |
PBO- |
48 |
DGND |
DGND |
||
|
24 |
PCO+ |
Podział PG wyjścia impulsowego fazy C |
Impuls zerowy |
49 |
— |
Zarezerwowany |
|
25 |
PCO- |
50 |
DGND |
DGND |
||
Przed przystąpieniem do podłączenia układu należy odpowiednio skonfigurować serwosterownik. Przede wszystkim należy ustawić Pn006.0 na 0 w celu odcięcia komunikacji z zewnętrznymi urządzeniami. Po zmianie należy zrestartować serwosterownik, aby zatwierdzić ustawienia.
2. Sterowanie prędkością
W przykładzie zastosujemy ustawienie prędkości za pomocą analogowego potencjometru, więc należy ustawić parametr Pn005.1 w serwosterowniku na wartość 0. Przed podłączeniem potencjometru do serwosterownika należy ustawić wartość wzmocnienia referencji prędkości w parametrze Pn300. Domyślna wartość jest ustawiona na 150, a rzeczywistą wartość prędkości obliczamy jako Vref(wartość napięcia)·Pn300. Przykładowo, gdy Pn300 = 300, a Vref = 5V, to otrzymamy prędkość 1500 obr/min.
Pozostało podłączyć nasz układ według poniższego schematu:
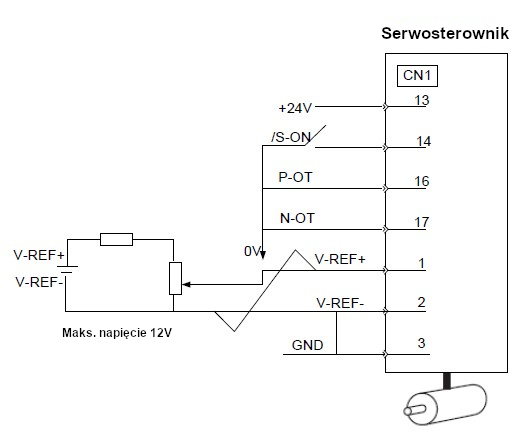
Serwonapęd rozpocznie pracę po załączeniu sygnału /S-ON. Jeśli podczas podania napięcia 0V następują obroty serwosilnika należy wykonać regulację offsetu. Najprościej możemy ją wykonać przy pomocy automatycznej regulacji offsetu prędkości Fn003. Przy wyłączonym serwosilniku (/S-ON Wył.) i ustawionym potencjometrze w pozycji 0 należy przejść do trybu funkcji użytkowych i po wybraniu Fn003 za pomocą ENTER nacisnąć przycisk MODE na dłużej niż 1 sek, po odpuszczeniu na ekranie powinien wyświetlić się komunikat „done” co oznacza, że powiodła się automatyczna regulacja offsetu prędkości. Aktualną prędkość w obr/min możemy obserwować w Un000.
3. Sterowanie momentem obrotowym
Wykonywane kroki będą podobne jak w przypadku sterowania prędkością. Na początku należy ustawić parametr Pn005.1 na wartość 2. Wzmocnienie sygnału referencyjnego momentu ustawiamy za pomocą parametru Pn400 (0,1V/100%). I podobnie jak w przypadku sterowania prędkości wartość rzeczywistą obliczamy jako Vref(wartość napięcia)·Pn400. Przykładowo dla wartości Pn400=100, wartość znamionową momentu obrotowego osiągniemy przy napięciu 10V.
Schemat podłączenia wygląda jak na rysunku powyżej tylko wejście potencjometru T-REF+ jest pod pinem 26 a T-REF- pod pinem 27.
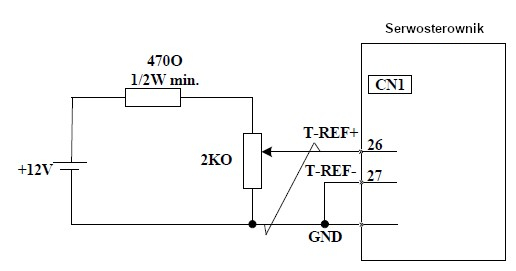
Rzeczywistą wartość momentu możemy obserwować w Un003.
Aby uzyskać dostęp do większej liczby lekcji, powróć na stronę startową kursu.
Jeśli masz pytania, skontaktuj się z nami pod adresem e-mail: sterowniki@elmark.com.pl . Chętnie wysłuchamy również każdą konstruktywną krytykę na temat jakości tego kursu.





















