

Spis treści
Aby uzyskać dostęp do większej liczby lekcji, powróć na stronę startową kursu.
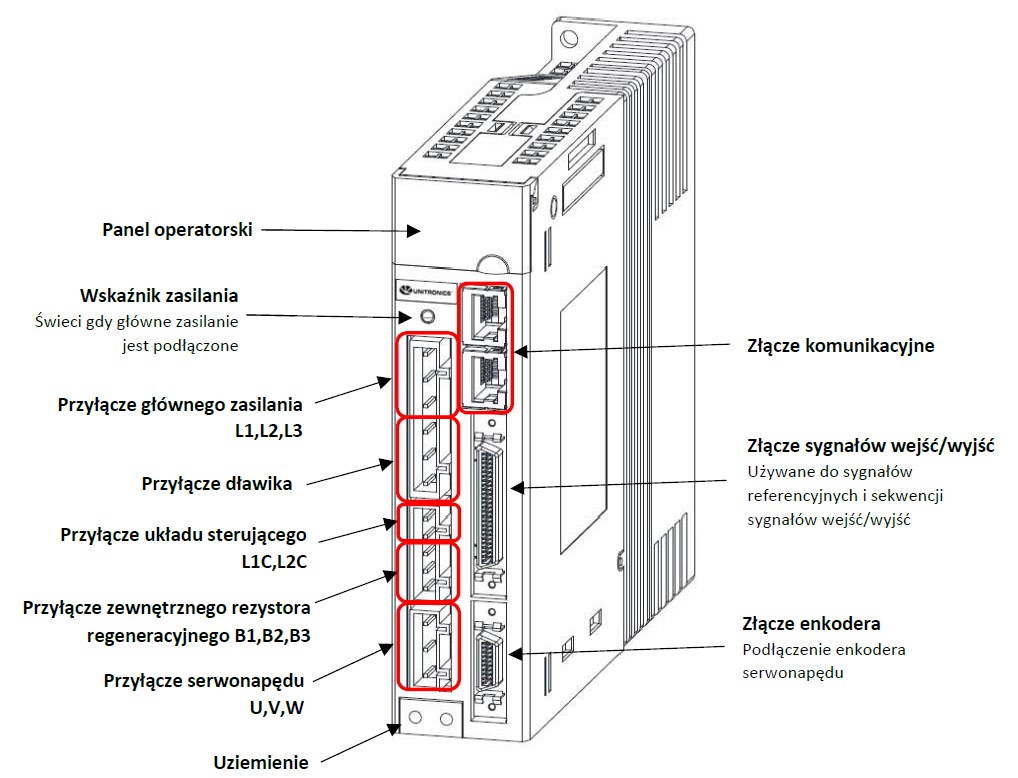
1. Podłączenie serwosilnika i serwosterownika
Serwosilnik składa się z dwóch wyjść kablowych, pierwszy służy do zasilania i sterowania układem, drugi do otrzymywania informacji zwrotnych z enkodera. Przewody zasilające występują w dwóch wariantach: do silników wyposażonych w hamulec lub do silników bez hamulca. Przewody do enkoderów wybieramy w zależności od rodzaju enkodera, w który wyposażono silnik (inkrementalny lub absolutny).
W zależności od używanego rodzaju serwosilnika oraz odpowiednio dobranych do nich serwosterowników, prawidłowe podłączenie przewodów będzie zależeć od sposobu zasilania (230 / 400 V, jedno/trój-fazowe). Poniżej zestawiono poszczególne symbole występujące na serwosterowniku wraz z opisem działania/podłączenia. Serwosterowniki 0007C~0015C mogą być zasilane jednofazowo 200V lub 3-fazowo 200V (3x120V).
|
Symbol |
Nazwa |
Napięcie zasilające [V] |
Model serwosterownika |
Opis |
|
L1, L2, L3 |
Przyłącze głównego zasilania |
230 |
0000B-0015C |
1-fazowe 200 ÷ 230 VAC +10% ÷ -15% (50/60 Hz) |
|
400 |
0010E-0050E |
3-fazowe 380 ÷ 400 VAC +10% ÷ -15% (50/60 Hz) |
||
|
FG |
FG |
230 |
0000B-0015C |
Nie używane |
|
U,V,W |
Przyłącze serwonapędu |
- |
- |
Podłącz z serwonapędem |
|
L1C, L2C |
Przyłącze układu sterującego |
230 |
0000B-0015C |
1-fazowe 200÷230 VAC +10% ÷ -15% (50/60 Hz) |
|
24 V, GND |
400 |
0010E-0050E |
24 VDC +10% ÷ -10% |
|
|
Uziemienie |
- |
- |
Podłącz do uziemienia zasilacza i serwonapędu |
|
|
B1, B2, B3 |
Przyłącze zewnętrznego rezystora regeneracyjnego |
230 |
0000B-0015C |
Podłącz zewnętrzny rezystor regeneracyjny do przyłącza B1 i B2 |
|
400 |
0010E-0050E |
Jeśli używasz wewnętrznego rezystora regeneracyjnego zewrzyj B2 i B3. Gdy pojemność wewnętrznego rezystora jest niewystarczająca usuń zwarcie na B2 i B3 i podłącz zewnętrzny rezystor regeneracyjny do przyłączy B1 i B2. |
||
|
Przyłącze dławika redukcji harmonicznych |
230 |
0000B-0015C |
Gdy potrzebna jest redukcja harmonicznych dławik podłącz do przyłączy 1 i 2. W przypadku nie korzystania z dławika zewrzyj przyłącza 1 i 2. |
|
|
400 |
0010E-0050E |
|||
|
Przyłącze masowe głównego zasilania |
230 |
0000B-0015C |
Nie używane |
|
|
400 |
0010E-0050E |
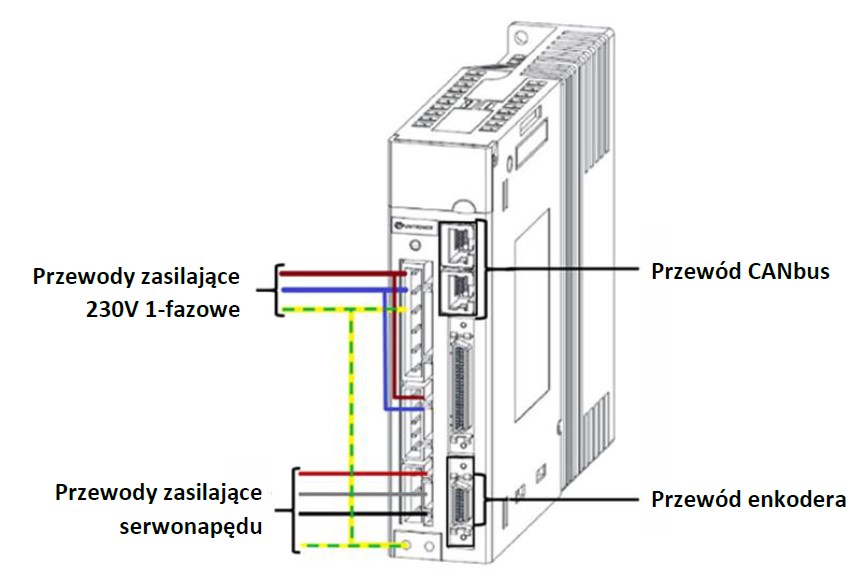
Schemat podłączenia serwonapędu do serwosterownika 230V, 1-fazowego przedstawiono poniżej. Do modeli UMD-0000B~0004B należy dołączyć zewnętrzny opornik regeneracyjny (60 W, 50 Ω).
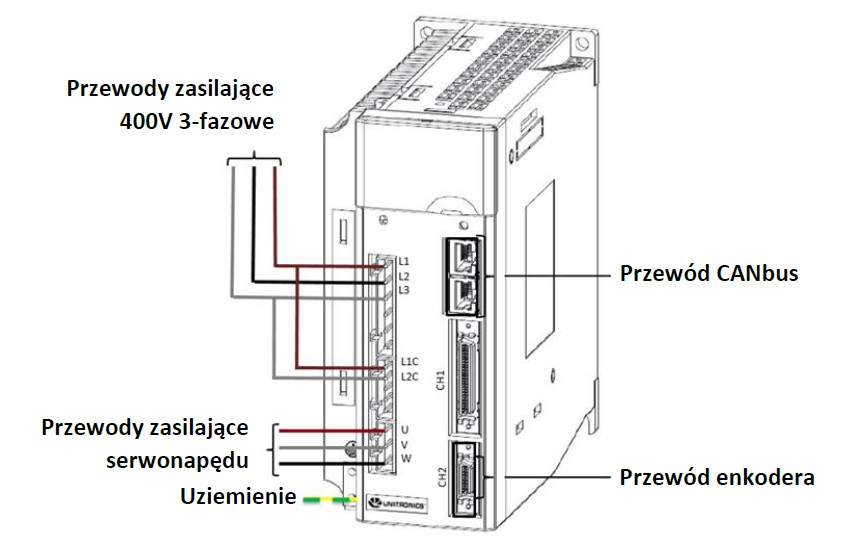
W przypadku użycia serwonapędu i serwosterownika 400V, 3-fazowego podstawowe podłączenie wygląda podobnie.
2. Podłączenie serwosterownika i sterownika PLC
Do komunikacji pomiędzy serwosterownikiem a sterownikiem PLC wykorzystuje się ModBus, CANopen lub EtherCAT. Serwosterowniki o oznaczeniu B3 standardowo wykorzystują połączenie CANopen natomiast E3, EtherCAT. Oprócz dołączenia do sterownika PLC odpowiedniego modułu rozszerzającego umożliwiającego podłączenie CANopen (w przykładzie moduł UAC-CX-01CAN) należy przygotować przewód transmisyjny. Jako przewód zostanie wykorzystany typowa skrętka T-568B z wejściem RJ45.
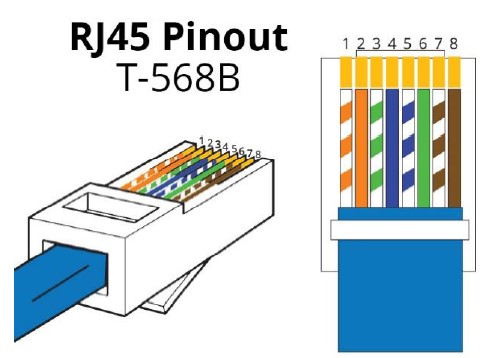
Wtyk RJ45 podłączamy do serwosterownika (złącze komunikacyjne) natomiast do modułu UAC-CX-01CAN w sterowniku PLC należy przygotować odpowiednio kostkę przyłączeniową wg. schematu poniżej.
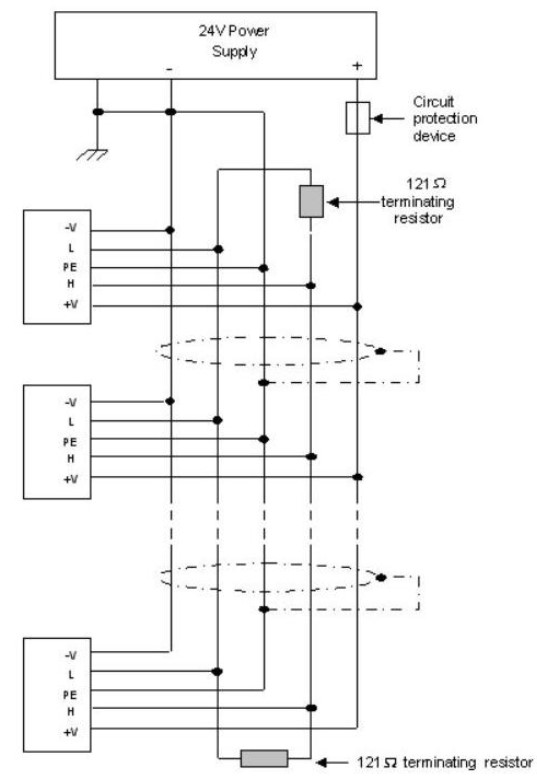
Tabela przyłączenia RJ45 do kostki CANbus:
|
Symbol (kostka przyłączeniowa) |
RJ45 |
Opis |
|
-V |
4 (Niebieski) |
Masa 0V |
|
L |
8 (Brązowy) |
CANbus Low |
|
PE |
- |
Uziemienie |
|
H |
7 (Brązowo – biały) |
CANbus High |
|
+V |
- |
Napięcie wejściowe 24V |
Do wejść H i L należy dołączyć opornik 121 Ω. Przewód masowy powinien być wspólny dla PLC i serwonapędu.
3. Tryb ręczny
Panel operatorski składa się z wyświetlacza oraz przycisków umieszczonych na przedniej części. Za pomocą panelu operatorskiego są wyświetlane parametry pracy, aktualne statusy i wykonywane funkcje.
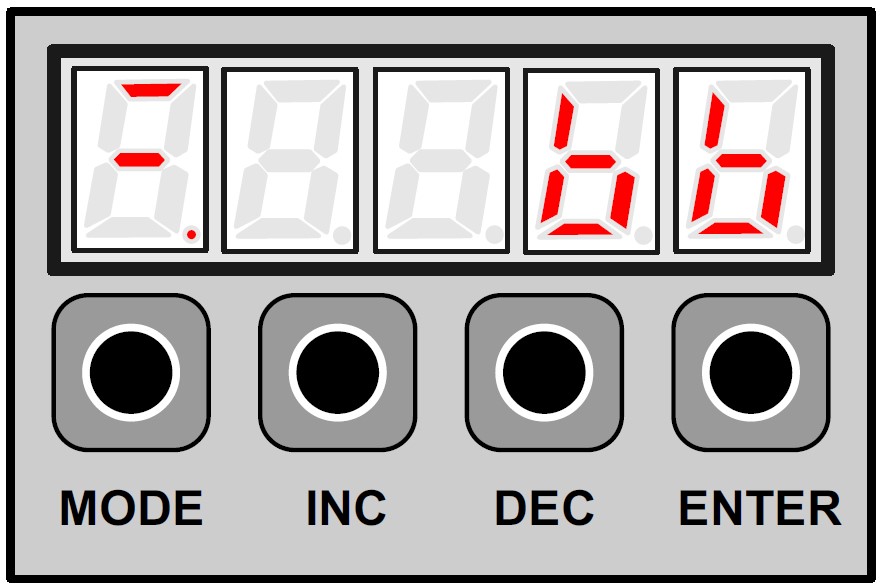
|
Symbol |
Nazwa przycisku |
Opis |
| ▲ |
Przycisk INC |
Wyświetlanie ustawień parametrów i ich wartości Zwiększanie / Zmniejszanie wartości |
| ▼ |
Przycisk DEC |
|
|
M |
Przycisk MODE |
Wybór podstawowych trybów Zapisywanie ustawień w trybie ustawień parametrów i wyjście |
| ◄ |
Przycisk ENTER |
Wyświetlanie parametrów i ich wartości, wyłączanie alarmów |
|
Tryb |
Nazwa trybu |
 |
Tryb wyświetlania |
 |
Tryb ustawień parametrów |
 |
Tryb monitorowania |
 |
Tryb funkcji użytkowych |
Alarmy mogą zostać wyłączone za pomocą przycisku ENTER gdy panel operatorski jest w trybie wyświetlania.
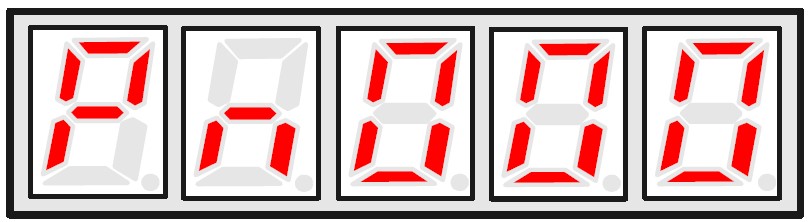
4. Pierwsze uruchomienie
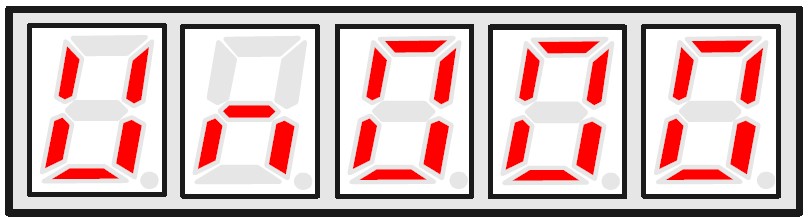
Przy pierwszym uruchomieniu serwosterownika po poprawnym podłączeniu serwonapędu i zasilania zostanie wyświetlony błąd A47 – Alarm stanu baterii enkodera absolutnego.
Przyczyną błędu jest:
- Brak informacji odnośnie pozycji obrotowej enkodera absolutnego,
- Napięcie baterii enkodera wynosi poniżej 2,5 V.
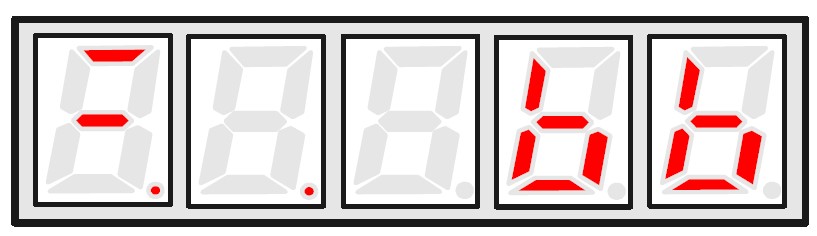
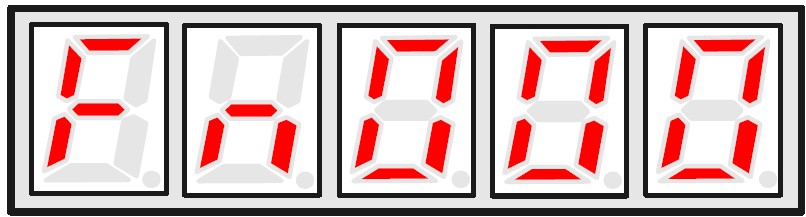
W celu usunięcia alarmu zostaną wykorzystane parametry Fn010 i Fn011.
Przy pomocy panelu operatorskiego przejdź do Fn010, naciśnij przycisk ENTER, na wyświetlaczu pojawi się c-PoS naciśnij przycisk MODE aby zresetować wartość enkodera absolutnego i alarm. Gdy zakończy się reset parametrów wyświetli się ekran clr--. Naciśnij przycisk MODE i wybierz tryb funkcji użytkowych. Za pomocą przycisków INC/DEC przejdź do parametru Fn011, naciśnij przycisk ENTER, wyświetli się c-Err, naciśnij przycisk MODE w celu usunięcia alarmu. Gdy nastąpi reset alarmu wyświetli się clr--.
Należy pamiętać że Fn010 i Fn011 można użyć wyłącznie gdy podłączony jest enkoder absolutny. Weryfikację prawidłowego połączenia serwonapędu z serwosterownikiem można przeprowadzić przy pomocy parametru Fn002.
Naciśnij przycisk MODE i wybierz tryb funkcji użytkowych. Za pomocą przycisków INC/DEC przejdź do parametru Fn002, naciśnij przycisk ENTER, wyświetli się JOG, naciśnij przycisk MODE w celu włączenia zasilania serwonapędów. Wyświetli się ekran JOG. Naciskając przycisk INC serwonapęd powinien obracać się do przodu, a za pomocą przycisku DEC do tyłu. Ponowne naciśnięcie przycisku MODE wyłącza zasilanie serwonapędu, a naciśnięcie przycisku ENTER powoduje powrót do trybu funkcji użytkowych.
5. Rozwiązywanie problemów
Możliwe że mimo poprawnego wykonania powyższej instrukcji na wyświetlaczu serwosterownika pojawi się błąd POT/NOT (blokujący obrót serwonapędu w przód i w tył) lub inny błąd uniemożliwiający prawidłowe sterowanie serwonapędem. Na początku należy sprawdzić czy w trybie ręcznego sterowania serwonapęd wykonuje obrót do przodu i tyłu. W tym celu należy wykonać kroki zgodne z rozdziałem 4 (instrukcja Fn002). Jeśli serwonapęd nie wykonuje ruchu prawdopodobnie problem jest w podłączeniu serwonapędu do serwosterownika (uszkodzone przewody lub nieprawidłowo podłączone).
W dalszych krokach niezbędne będzie odblokowanie ręcznej zmiany parametrów. Naciśnij przycisk MODE i wybierz tryb funkcji użytkowych. Za pomocą przycisków INC/DEC przejdź do parametru Fn007, naciśnij przycisk ENTER, następnie sekwencję przycisk INC, przycisk DEC, przycisk DEC przycisk INC i powróć do funkcji użytkowych przyciskiem ENTER. Teraz przeglądając tryby przyciskiem MODE powinna być możliwość wyboru trybu ustawień parametrów.
1. Parametr Pn000
Wejdź w ustawienia parametru Pn000 przyciskiem ENTER, następnie przytrzymaj przycisk ENTER do momentu migania kropki w prawym dolnym rogu. Za pomocą przycisku ENTER przechodzimy do następnej cyfry a przyciskami INC/DEC zwiększamy/zmniejszamy wartość. Należy wpisać wartość b0110. Aby zakończyć należy przytrzymać przycisk ENTER do momentu zgaszenia kropki i powrócić do trybu ustawień parametrów przyciskiem ENTER. Zmiany zostaną wprowadzone po ponownym uruchomieniu serwosterownika.
2. Parametr Pn006
Parametr Pn006 odpowiada za sposób komunikacji z sterownikiem. Jako że używamy CANopen to pierwsza cyfra powinna być 3. Należy się upewnić że wpisana jest wartość H0023.
3. Parametr Pn704
Parametr odpowiada za identyfikator CANopen. Należy ustawić wartość zgodną z ustawioną w projekcie UniLogic. Dla naszego przykładu będzie to wartość 00002.
4. Zakłócenia komunikacji CANopen
Istnieje możliwość że występują zakłócenia w sieci uniemożliwiające prawidłowe działanie protokołu CANopen. W celu eliminacji zakłóceń należy wpiąć w wolne gniazdo CANbus rezystor terminujący RJ45 o wartości 120 Ω.
6. Film instruktażowy
Więcej o przygotowaniu serwonapędu do pracy dowiedzą się Państwo z filmu poniżej. W filmie poruszam kwestię:
- podłączenia układu sterownik PLC - serwosterownik - serwosilnik,
- przygotowania do pracy serwonapędu,
- testowania pracy.
Aby uzyskać dostęp do większej liczby lekcji, powróć na stronę startową kursu.
Jeśli masz pytania, skontaktuj się z nami pod adresem e-mail: sterowniki@elmark.com.pl . Chętnie wysłuchamy również każdą konstruktywną krytykę na temat jakości tego kursu.





















