
Spis treści
Producenci serwonapędów, silników krokowych, przemienników częstotliwości i innych urządzeń kontroli ruchu przyzwyczaili nas do używania popularniejszych standardów komunikacyjnych (tj. Modbus, CANopen, EtherCAT, Ethernet/IP) do sterowania ruchem. Jest to bardzo wygodne rozwiązanie, pozwalając na znacznie łatwiejszą konfigurację i integrację serwonapędu z pozostałymi elementami w automatyce przemysłowej jak układ sterowania, a dzięki wysokiej prędkości przesyłu danych pozwala m. in. na realizację synchronizacji ruchu. Rozwiązanie to wymaga jednak stosowania dedykowanych urządzeń lub konwerterów, które są w stanie przetworzyć dane z protokołów komunikacyjnych, co sprawia że nie jest to budżetowe rozwiązanie. Praktycznie każdy serwosterownik ma wbudowane porty wejść/wyjść, które służą do podłączenia zewnętrznych elementów jak: czujniki, krańcówki itp., a również do zarządzania sygnałami załączenia i stopu. Co jednak często ucieka uwadze użytkownikom, to możliwość sterowania silnikiem serwo bezpośrednio za pomocą wbudowanych wejść serwosterownika np. sterownikiem PLC.
Sterowanie konwencjonalne (analogowe/impulsowe)
Największą zaletą sterowania konwencjonalnego jest ogromna dowolność w kwestii doboru urządzenia sterującego układem kontroli ruchu. Wystarczy, że nasze urządzenie potrafi wysyłać odpowiedni sygnał elektryczny i możemy bez problemu sterować serwonapędem. Oczywiście sterowanie konwencjonalne pozwala na wykorzystanie takich samych trybów co interfejsy komunikacyjne, czyli kontroli prędkości, pozycji, momentu obrotowego. Najczęściej stosuje się urządzenia wykorzystywane w zastosowaniach przemysłowych, tj. sterowniki PLC wyposażone w szybkie wyjścia (PTO), sterowniki ruchu, których rozbudowana funkcjonalność przydaje się w złożonych maszynach czy CNC. Również ze względu na wysoką szybkość przetwarzania danych coraz częściej spotyka się komputery przemysłowe, które pełnią funkcję sterownika ruchu, jak np. komputer Elmatic, który służy do sterowania procesem obróbki w 5-cio osiowej maszynie numerycznej (LINK). Sterowanie konwencjonalne oferują również serwonapędy Elmatic. Pominięcie obsługi popularnych protokołów pozwoliło uczynić z nich rozwiązanie budżetowe i uniwersalne, dzięki czemu znajdzie zastosowanie w prostych maszynach.
Czy tanie rozwiązanie oznacza gorszą jakość?
Oczywiście, że NIE. Serwonapędy Elmatic mimo niskiej ceny, jakościowo nie różnią się zbytnio od serwonapędów popularnych marek. Z silnikiem wyposażonym w 23 bitowy enkoder absolutny pozwala na pracę w pętli zamkniętej sprzężenia zwrotnego oraz rozróżnienie ponad 8 mln różnych pozycji, co odpowiada 0,15 arcs. Częstotliwość pracy sięgająca do 1,3 kHz zapewnia wysoką precyzję i dynamikę ruchu. Umożliwia pracę przy dużych prędkościach obrotowych dochodzących do 5000 obr/min i nawet 3-krotną przeciążalność. Dodatkowo serwonapęd można wyposażyć w hamulec elektromagnetyczny oraz w celu zwiększenia momentu dobrać odpowiednią przekładnię planetarną. Różnica między droższymi rozwiązaniami polega przede wszystkim na „dostępnej” funkcjonalności. W większości dedykowanych urządzeń kontroli ruchu serwonapęd współpracuje z określonym sterownikiem, dzięki czemu duża ilość funkcjonalności może być zawarta w oprogramowaniu i realizowana za pomocą gotowych bloków funkcyjnych lub podprogramów. Takie rozwiązanie jest na pewno wygodniejsze, jednak zwiększa też znacząco koszt takiego systemu. Serwonapędy Elmatic posiadają wbudowane podstawowe funkcję, a rozszerzenie sposobu realizacji ruchu, będzie leżeć po stronie urządzenia nadrzędnego, tak więc nasz serwonapęd możemy rozbudować tylko o niezbędną funkcjonalność, tym samym nie przepłacając za niepotrzebne funkcje.
Sterowanie impulsowe (sterowanie pozycją)
Sterowanie serwonapędami Elmatic za pomocą sygnałów impulsowych jest podstawową metodą zadawania ruchu, wyróżniamy 3 rodzaje obsługiwanego sygnału:
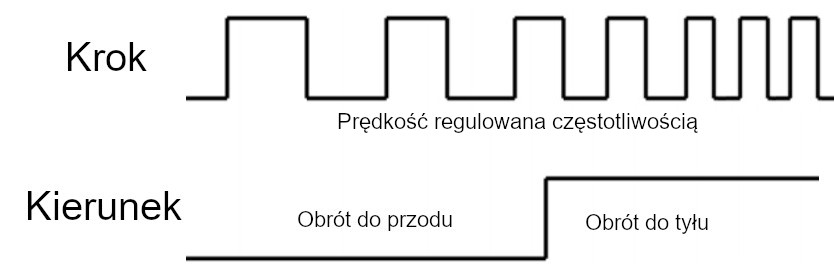
- Krok + kierunek (Puls + Sign),
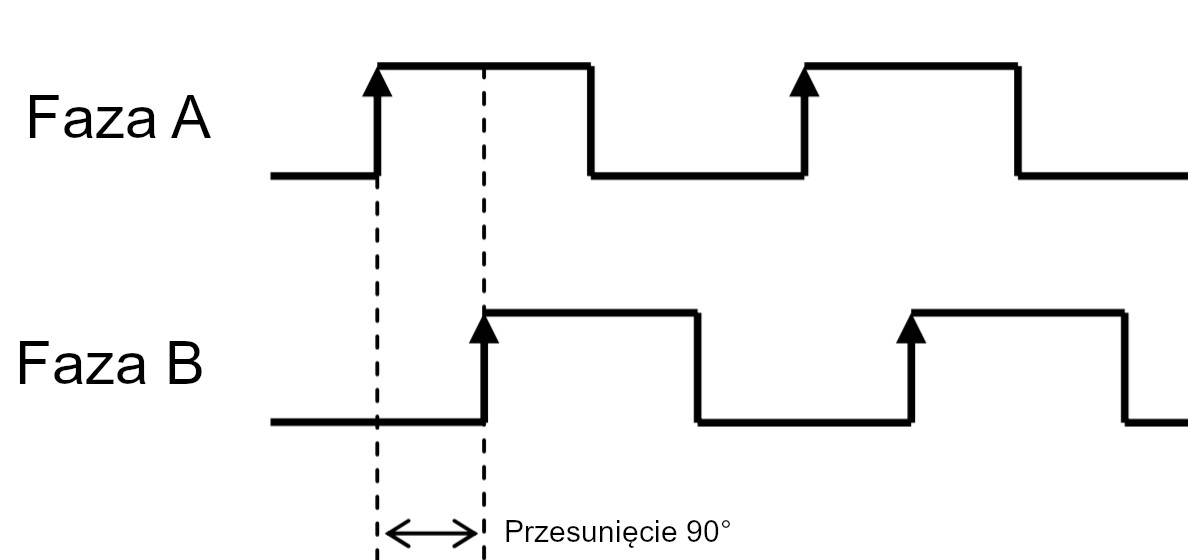
- Faza A+B (sygnał stosowany w enkoderach),
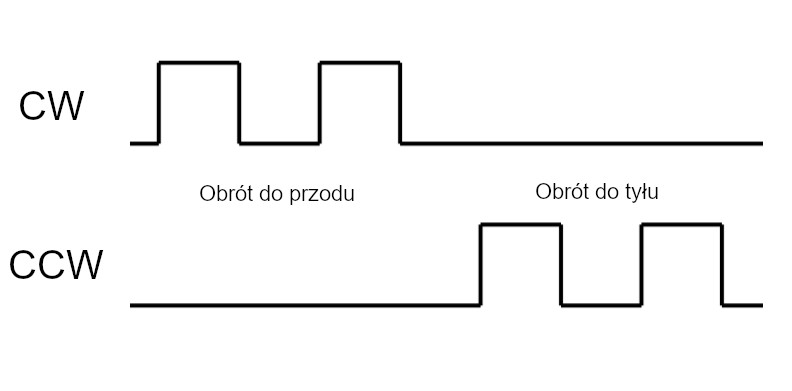
- CW + CCW.
| Forma sygnału impulsu | Dodatnia logika | Ujemna logika | ||
| Przód | Tył | Przód | Tył | |
| Kierunek + krok |  |
 |
 |
 |
| Faza A i faza B impuls prostokątny |  |
 |
||
| CW+CCW |  |
 |
||
 |
 |
|||
Sygnał krok + kierunek
Potocznie nazywamy sygnałem jedno-impulsowym, ponieważ tylko jedna linia sygnałowa wysyła impulsy. Sygnał impulsowy (krok) dostarcza serwosterownikowi dane nt. kąta obrotu oraz szybkości obrotu (częstotliwość sygnału), natomiast drugi sygnał wejściowy (kierunek) determinuje kierunek obrotu.
Sygnał faza A+B
Ten rodzaj sygnału najczęściej spotykamy w enkoderach. Występują dwa sygnały impulsowe przesunięte w fazie o 90°. Stosuje się go w aplikacjach, gdzie serwonapęd ma pełnić rolę osi podążającej za osią nadrzędną (w tym wypadku enkoderem). Kierunek obrotu określa się poprzez pierwszeństwo narastania impulsów (A-B obrót do przodu, B-A obrót do tyłu).
Sygnał CW+CCW
Tutaj natomiast występują dwa źródła sygnału impulsowego. W zależności od kierunku obrotu możemy podawać sygnał impulsowy na linię CW (obrót do przodu) lub CCW (obrót do tyłu).
W dalszych części skupimy się na podłączeniu za pomocą sygnału krok + kierunek.
Sposób podłączenia sterownika PLC do serwosterownika Elmatic
System kontroli ruchu będzie składał się z czterech urządzeń:
- Sterownika PLC: USP-104-M10
- Modułu szybkich wejść/wyjść UID-0808THS (wyposażonego w wyjścia PTO)
- Serwosterownika Elmatic (EMD100-40A-2(00))
- Serwosilnika Elmatic (EMM-60KP40A30PAYYB)
Początkowo rozpoczniemy od podłączenia serwonapędu wg. schematu poniżej.
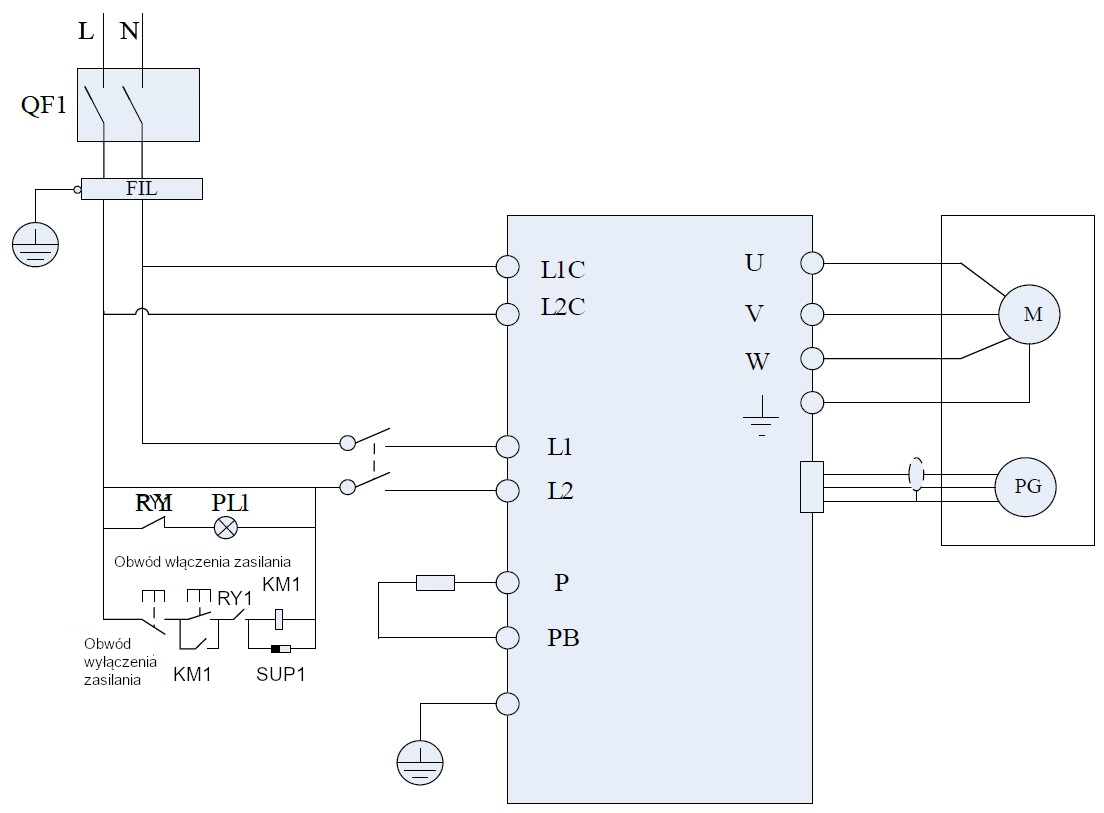
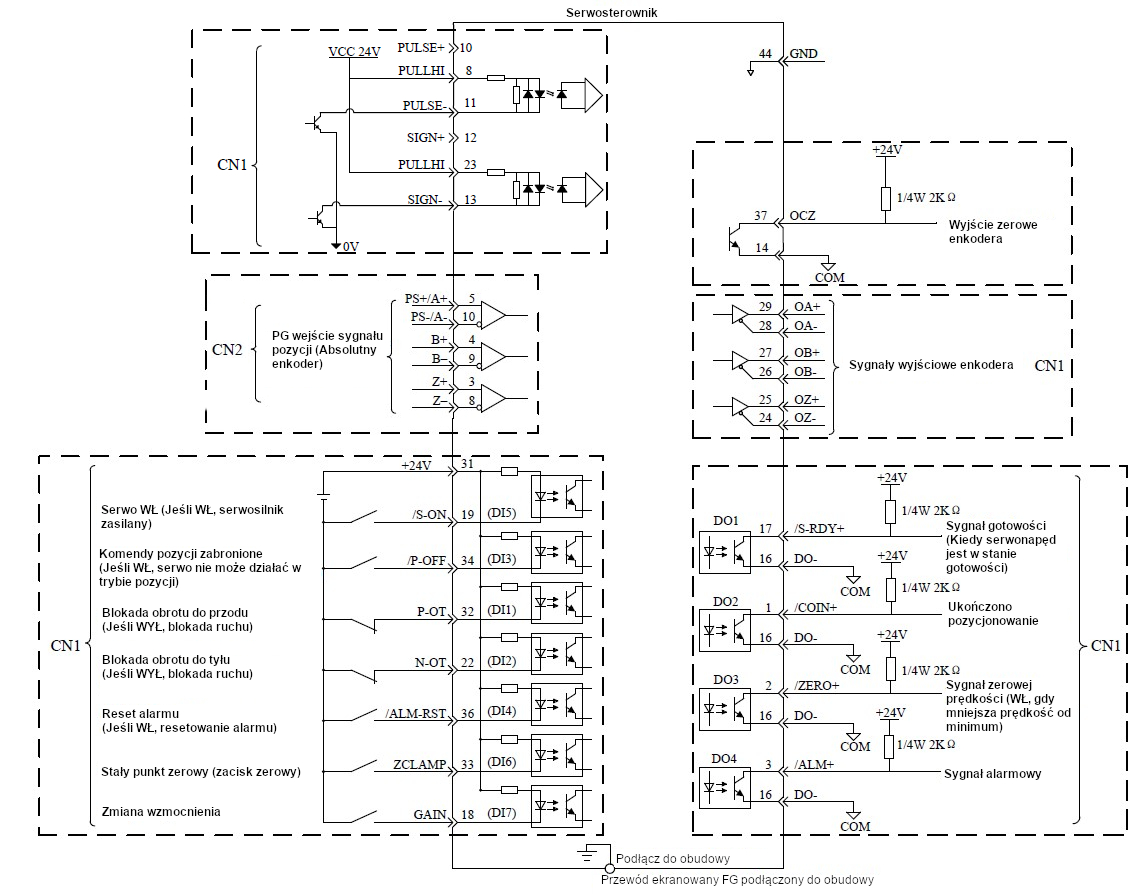
Następnie należy przygotować złącze sterowania CN1. Będziemy wykorzystywać sterowanie pozycją za pomocą sygnału krok + kierunek (schemat wejść/wyjść). W celu umożliwienia ruchu należy podłączyć +24V do wejścia 31 i 0V do wejścia 44. Przejście z trybu postoju (rdy) do ruchu (run) następuje przez wejście 19. Możemy nim sterować za pomocą wyjść w sterowniku PLC lub po prostu za pomocą przełącznika.
Moduł szybkich wejść/wyjść UID-0808THS wykorzystuje wyjścia typu PNP, więc należy podłączyć moduł sterownika PLC z serwosterownikiem stosując poniższy schemat.
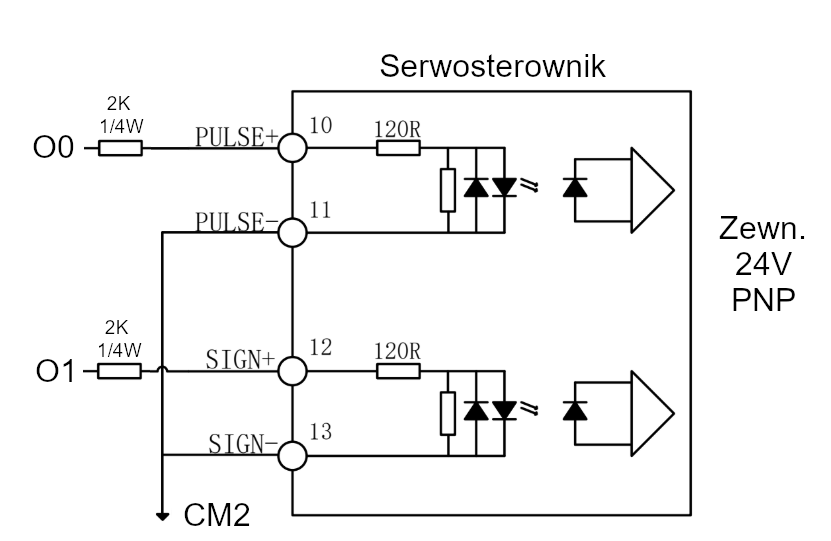
Symbole O0, O1, CM2 odpowiadają wyjściom znajdującym się w module UID-0808THS. Należy pamiętać, że przewód masowy CM2 nie można podłączyć do masy systemu (0V), ponieważ spowoduje to niewłaściwe działanie szybkiego sygnału PTO. Dodatkowo ważne jest zastosowanie oporników minimum 2kOhm w celu ograniczenia prądu wchodzącego do optoizolara (również będzie to skutkować spadkiem napiecią).
Na koniec wystarczy odpowiednio skonfigurować moduł szybkich wejść/wyjść i napisać program w środowisku UniLogic. Konfigurację rozpoczynamy od przejścia do Uni-IO i Uni-COM w „Drzewku projektu” UniLogic i przeciągamy do naszego sterownika model UID-08080THS z „Przybornika”.

W oknie „Właściwości” wybieramy przechodzimy do ustawień Bloku 1. Jako rodzaj sygnału (High-Speed Type) wybieramy PTO, interfejs Pulsy + kierunek. W zależności od naszych upodobań wybieramy polaryzację kierunku (Direction Polarity): W górę = 1, gdy chcemy żeby sygnał kierunku w stanie wysokim powodował ruch do przodu lub W górę = 0, aby działał na odwrót.
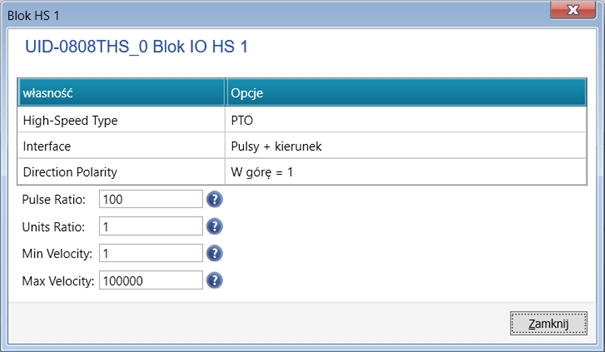
Z początku skomplikowaną czynnością może wydawać się dobór stosunku impulsów i jednostek (Pulse Ratio i Units Ratio). Przy ich doborze należy wziąć pod uwagę jeszcze ustawienia przekładni elektronicznej w serwosterowniku. W serwonapędach Elmatic ustawień stosunku elektronicznej przekładni wykonujemy w parametrach P04-07 (licznik) i P04-09 (mianownik). Gdzie P04-07 odpowiada rozdzelczości enkodera absolutnego (23bitowy = 2^23 = 8388608), a P04-09 rozdzielczość osi (dowolność użytkownika).

W takiej konfiguracji wysłanie 10000 impulsów spowoduje obrót o 360°. Żeby dodatkowo ograniczyć ilość wpisywanych danych dobrałem Pulse ratio = 100 i Units Ratio = 1, tak więc pełny obrót dookoła osi nastąpi przy wybraniu dystansu = 100. Natomiast gdybyśmy wybrali Pulse ratio = 10000 i Units Ratio = 1 obrót o 360° nastąpiłby przy ustawieniu dystansu = 1. Ilość wysyłanych impulsów możemy określić wzorem:
Po udanej konfiguracji wystarczy zaprogramować ruch i wykonać ekran do zarządzania ruchem. Jest to stosunkowo proste bo wystarczy użyć bloku funkcyjnego (PTO Move), więc z linku poniżej możecie pobrać gotową aplikację.
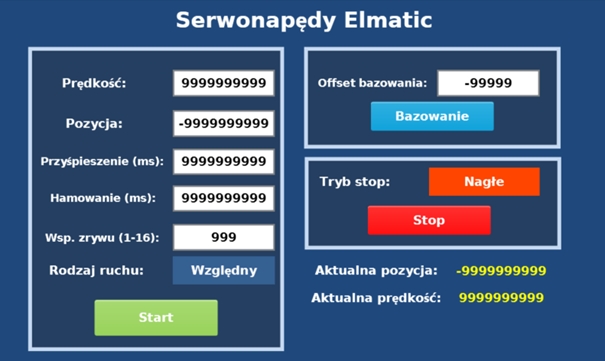
Aplikacja sterowania serwonapędem Elmatic
Panelem operatorskim wbudowanym w sterownik PLC sterujemy ruchem serwonapędu. Wystarczy wpisać odpowiednie parametry ruchu i naciskając Start rozpoczniemy obroty silnika. Aktualna pozycja i prędkość jest obliczana na podstawie ilości wysłanych impulsów. W przypadku konieczności bazowania możemy wykorzystać przycisk Bazowanie.
Akademia Serwonapędów
Jeśli chcesz dowiedzieć się więcej o naszych serwonapędach odwiedź Akademię Serwonapędów, a otrzymasz solidną dawkę wiedzy o:
- konfiguracji serwonapędów
- programowaniu serwonapędów w środowisku Unilogic
- zdalnej diagnostyce
- trybach pracy
- komunikacji EtherCat w serwonapędach
Zachęcamy również do zapoznania się z naszą ofertą serwonapędów Unitronics i serwonapędów Elmatic.





















