
Wstęp
EtherCAT jest to wysokowydajna technologia Ethernetu Przemysłowego o elastycznej topologii. Zgodnie z najnowszym (stan na 2023) raportem popularności protokołów przemysłowych zajmuje już 3 miejsce z 12% udziałem w rynku (raport). Nie dziwi zatem potrzeba integracji maszyn starszego typu, posiadających tylko łączność szeregową (tj. serwonapędów, falowników, wysp I/O lub nawet urządzeń do akwizycji danych) z systemami nadrzędnymi po protokole EtherCAT (głównie sterowniki PLC Beckhoff).
Posiadając w swoim sterowniku lub komputerze przemysłowym obsługę protokołu EtherCAT Master nie musisz wymieniać urządzeń obsługujących komunikację po łączu szeregowym (RS232 lub RS485). Jest to ogromna oszczędność pieniędzy oraz czasu, które byłyby konieczne do implementacji nowych urządzeń.
Rozwiązanie Anybus
Z punktu widzenia automatyka najlepiej jak najmniej ingerować w system nadrzędny tak, aby cała komunikacja szeregowa była obsługiwana niezależnie. Dlatego z pomocą przychodzi rodzina bram komunikacyjnych firmy Anybus – ABC30xx. W artykule tym skupimy się na EtherCAT - Serial, czyli ABC3061.
![]()
To rozwiązanie do skomunikowania ze sobą urządzenia EtherCAT Master (najczęściej jest to sterownik PLC firmy Beckhoff) oraz urządzenia z szeregową komunikacją - Modbus RTU lub własnej ramki. Dzięki temu nie ma potrzeby pisania dodatkowego kodu do sterownika nadrzędnego. Po stronie szeregowej mamy do wyboru obsługę Modbus RTU lub własnej ramki (Produce/Consume lub Request/Response). Urządzeń obsługujących taką komunikację jest mnóstwo:
- serwonapędy,
- falowniki,
- wyspy I/O,
- inne elementy wykonawcze.
Ty decydujesz będzie wysyłał/odbierał (do 1500 bajtów) po stronie szeregowej i udostępniał do sieci EtherCAT (do 1486 bajtów danych). ABC3061 posiada listwę zaciskową do łącz szeregowych RS232 i RS485, Ethernet do konfiguracji (Config X1) oraz dwa porty Ethernet do komunikacji EtherCAT (X2.1 oraz X2.2).

Co wyróżnia Anybus?
Istnieją takie 4 istotne cechy.
-
Wysoka wydajność, czyli błyskawiczny transfer danych pozwalający w pełni wykorzystać możliwości szybkich sieci przemysłowych. Sprzętowo przyspieszona konwersja swap-endian (zamiana bajtów) oszczędza czas przetwarzania w systemach nadrzędnych.
-
Trwałość. Urządzenie budowane jest od podstaw w Szwecji przy użyciu starannie dobranych komponentów przemysłowych i zweryfikowane pod kątem standardów branżowych. Sprawdzona zgodność ze wszystkimi normami odnośnie każdej z sieci (link) osiągana jest dzięki najnowszej generacji procesorowi NP40.
-
Cyberbezpieczeństwo. Bezpieczne uruchamianie chroni przed złośliwym oprogramowaniem. Dodatkowo, przełącznik bezpieczeństwa zapewnia fizyczną obronę przed nieautoryzowanymi zmianami w konfiguracji.
-
Łatwość konfiguracji. Szybka instalacja to zasługa intuicyjnemego GUI, łatwej do zrozumienia dokumentacji i efektywnej konstrukcji obudowy. GUI znacznie poprawia analizę danych na żywo, eksport logów oraz ewentualne generowanie paczki wsparcia technicznego.
Konfiguracja ABC3061
Komunikacja z urządzeniem
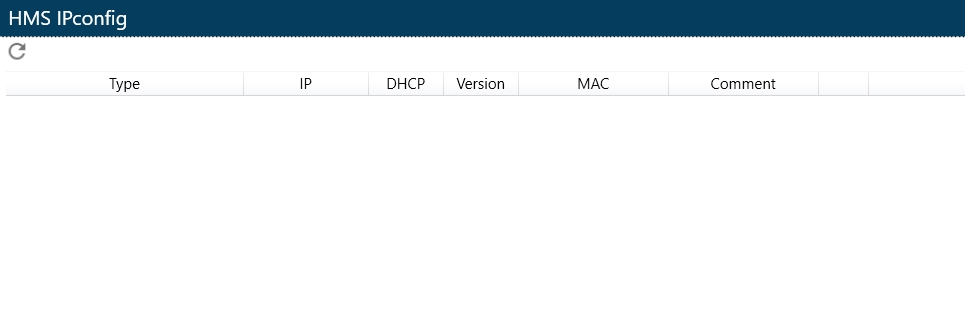
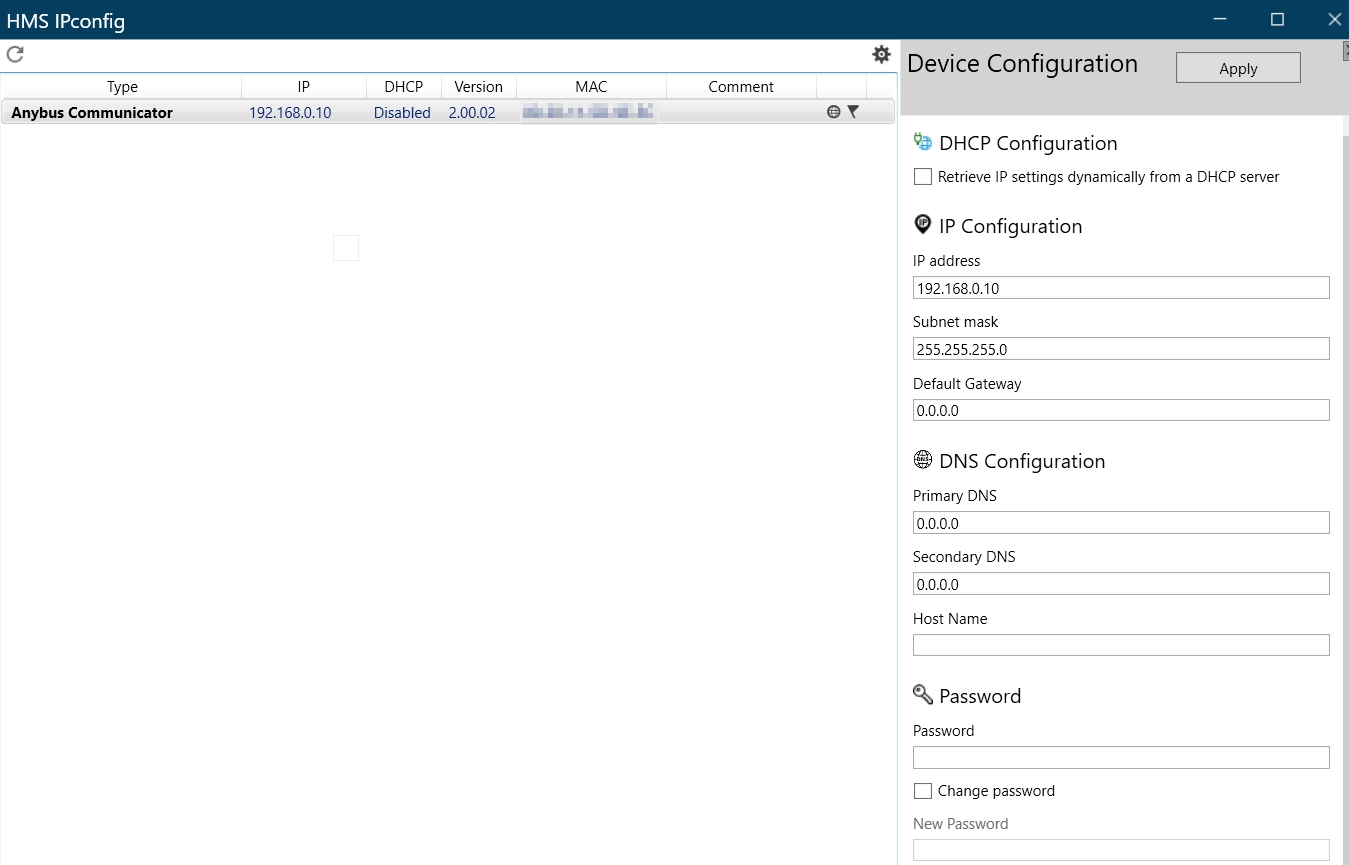
Na urządzeniu zawsze znajduje się domyślny adres IP: 192.168.0.10. Jeżeli chcemy konfigurować urządzenie na inne IP należy najpierw zainstalować oprogramowanie HMS IPconfig, służące do wyszukiwania urządzeń Anybus oraz zmiany ich adresów. Po uruchomieniu go ukaże nam się poniższe okno.
Jeżeli brama Anybus została zasilona i podłączona na pierwszym porcie Ethernet do sieci LAN, w której znajduje się dany komputer PC (nie musi być w tej samej podsieci) powinieneś zobaczyć znaleziony sprzęt.
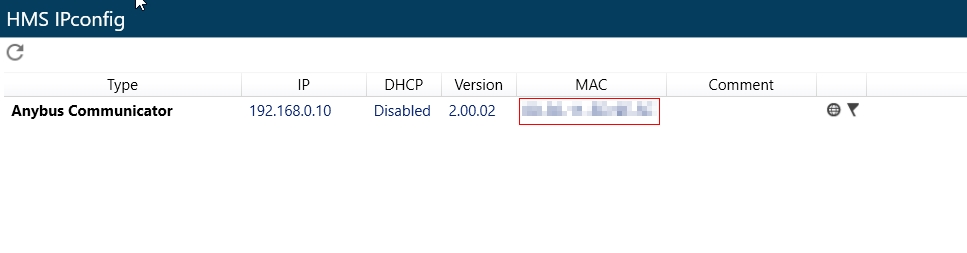
Po dwukrotnym kliknięciu na dane urządzenie ukaże się tryb edycji adresu IP. Możesz też ustawić w tryb automatycznego adresu IP nadawanego przez istniejący serwer DHCP.
Na potrzeby artykułu zmienimy adres IP na taki z innej podsieci: 192.168.100.100, a następnie wybieramy przycisk Apply. Gdy zmiany zostaną pomyślnie zaakceptowane pokaże się stosowny komunikat w dolnym pasku HMS IPconfig.
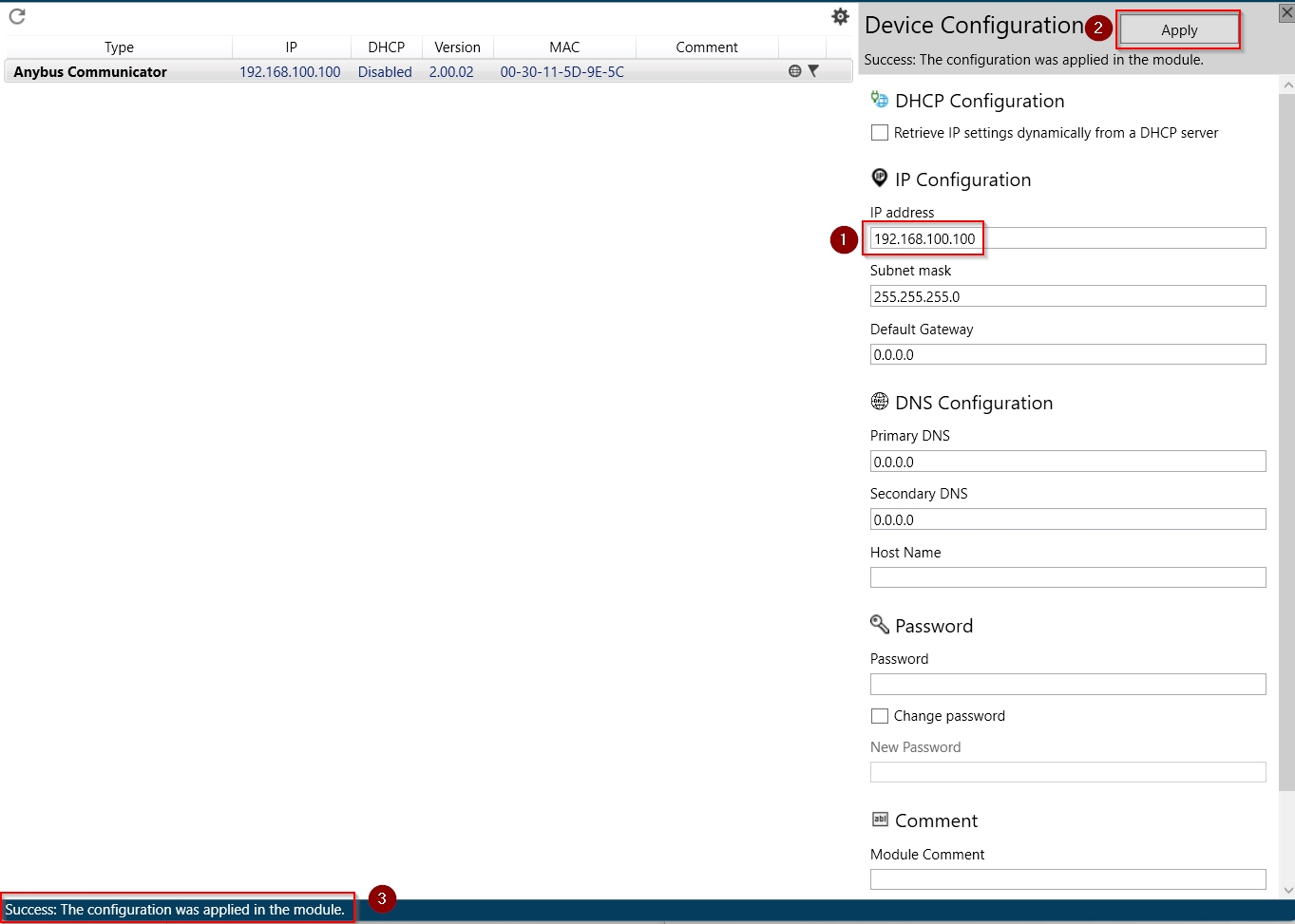
W tabeli powinien pokazać się zaktualizowany adres IP. W tym momencie możesz otworzyć przeglądarkę w komputerze i wybrać adres 192.168.100.100 lub kliknąć ikonę globusa w oprogramowaniu, dzięki czemu automatycznie zostaniesz przekierowany do przeglądarki z otwartym już adresem.

Webserver ABC3061
Konfiguracja urządzenia odbywa się przez przeglądarkę i nie potrzebne jest żadne dodatkowe oprogramowanie. Główny interfejs jest podzielony na 3 części: dwie z nich dotyczą protokołów komunikacyjnych, natomiast trzecia odnosi się do działania całej bramy komunikacyjnej.

Istnieją cztery możliwe ikony wyświetlane w każdej części:
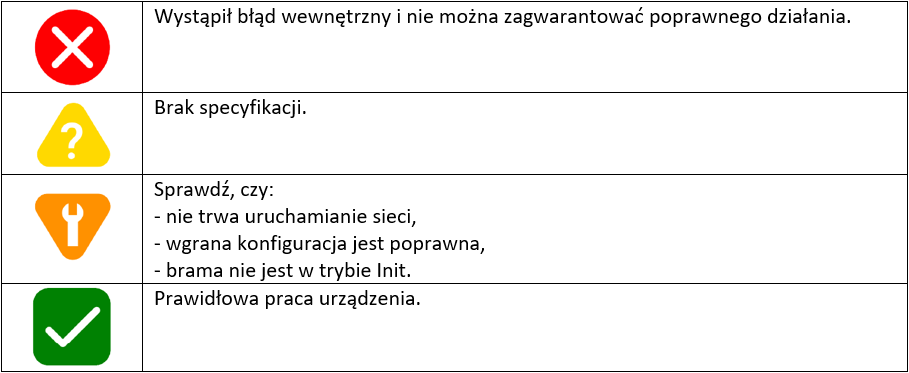
Należy pamiętać, że każdą zmianę w konfiguracji należy zatwierdzić klikając zielony przycisk Apply w górnym pasku.
Konfiguracja strony szeregowej
W przeglądarce, z drzewa projektu po lewej stronie wybierz Serial RS-232/485.

Strona szeregowa obsługuje 3 rodzaje komunikacji:
- Modbus RTU - otwarty protokół komunikacyjny,
- Custom Request/Response - własna ramka oparta na schemacie zapytanie -> odpowiedź,
- Custom Produce/Consume - własna ramka oparta na dowolności wysyłań/odbiorów poszczególnych ramek (np. z czytnika kodów kreskowych po pojawieniu się jego odczytu).
Kolejne pola służą do wyboru warstwy fizycznej (RS232 lub RS485) oraz konfiguracji podstawowych ustawień połączenia tj.:
- prędkość transmisji,
- liczba bajtów danych,
- parzystość,
- liczba bitów stopu.
Istnieje możliwość zaawansowanej detekcji ciszy pomiędzy ramkami - w Modbus RTU jest to minimum 3,5 znaku. Producent zaleca by tego nie zmieniać.
W kolejnej zakładce - Nodes & transactions możesz dodawać poszczególne Node'y (urządzenia o unikatowym ID) oraz do każdego z nich transakcje (zapytanie/odpowiedź).

Dobrą praktyką jest nadawanie nazw każdemu urządzeniu oraz każdej transakcji w celu przejrzystości programu.
W artykule tym skonfigurowane zostały poszczególne transakcje dla serwonapędu z obsługą Modbus RTU - EMD100-40A-2
1. cykliczny (3ms) odczyt położenia enkodera (zgodnie z dokumentacją urządzenia kod funkcji #3 - dwa adresy od 2823 , czyli do 0B07h do 0B08h)


Na koniec kliknij przycisk Apply na górnej belce w celu wgrania konfiguracji.

By sprawdzić poprawność wymiany danych pomiędzy ABC3061 a urządzeniami szeregowymi wybierz zakładkę Diagnostic -> Serial RS-232/485 a następnie kliknij Start:

Konfiguracja strony EtherCAT
W przeglądarce, z drzewa projektu po lewej stronie wybierz EtherCAT.

Możemy tutaj wybrać automatyczne obliczenie, ile bajtów In oraz Out będzie wymienianych z urządzeniem EtherCAT Masterem lub podać te wartości manualnie.
Na koniec jest możliwość ściągnięcia pliku ESI tego konwertera to importu go do EtherCAT Master.
Konfiguracja mapy danych I/O
Domyślnie konwerter układa w sposób uporządkowany dane wejściowe oraz wyjściowe (zakładka I/O Data Map). Możesz to dowolnie zmienić za pomocą metody przeciągnij i upuść. W omawianym przypadku to 4 bajty Input oraz 0 bajtów Output.

Przechodząc do głównego menu Home zobaczysz wszystkie wprowadzone ustawienia strony EtherCAT oraz szeregowej.

Teraz wystarczy podłączyć urządzenie nadrzędne EtherCAT Master do bramy.
Konfiguracja EtherCAT Master
Do konfiguracji EtherCAT Master posłuży w tym przykładzie sterownik PLC firmy Unitronics - USC-B10-TA30.

Jego oprogramowanie - UniLogic - jest darmowe i do ściągnięcia ze strony producenta. Tak wygląda konfiguracja połączenia obu urządzeń po EtherCAT.

Po wgraniu takiej konfiguracji do sterownika i wystawieniu tych zmiennych na jego wirtualny panel HMI otrzymaliśmy pełny pulpit sterowniczy do serwonapędu:
Wracając do głównego menu w ABC3061 widać, że obie strony działają poprawnie.

Podsumowanie
Jeżeli szukasz możliwości rozbudowy swojego systemu np. z Beckhoff na dowolnie inny oferujący obsługę protokołów szeregowych to rozwiązanie jest zdecydowanie dla Ciebie. Nie potrzebujesz modyfikować całej infrastruktury przemysłowej - wystarczy prosty konwerter i sprawa gotowa. Oczywiście nie powinieneś ufać temu, co zostało tutaj napisane. Dlatego istnieją dwie możliwość bezpłatnego przetestowania ich możliwości:
1. symulacja pracy urządzenia na stronie https://emulator.online-config.anybus.com/
2. wypożyczenie dowolnego urządzenia do testów/nauki na okres 2 tygodni oraz pełne wsparcie techniczne.
Po więcej informacji zapraszamy na naszą stronę: https://www.elmark.com.pl/producenci/view/anybus lub do kontaktu telefonicznego +22 541 84 60 a także mailowego sterowniki@elmark.com.pl.