Celem strojenia jest osiągnięcie stabilności systemu. W przypadku kontroli ruchu oznacza to, że mamy ustalony skończony punkt docelowy, a rzeczywista pozycja jest również skończona. Całkowicie przeciwna sytuacja jest w przypadku niestabilnego systemu. Mimo, że mamy skończony punkt docelowy, nie ważne jak blisko aktualnej pozycji to rzeczywista pozycja będzie obarczona pewnym błędem (możliwe, że stale narastającym), który będzie przejawiał się np. oscylacjami systemu.
Poniższe ilustracje opisują podstawowe rodzaje odpowiedzi na wymuszenie.
|
Odpowiedź układu |
Opis |
Profil ruchu |
|
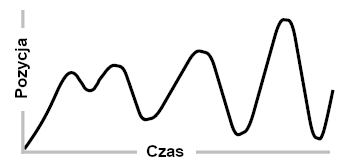
Niestabilna |
Niestabilność systemu powoduje oscylacje pozycji w niekontrolowany sposób |
 |
|
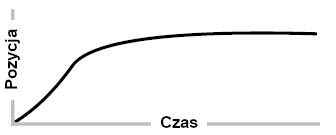
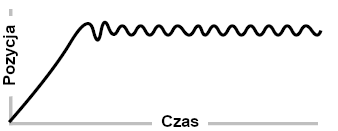
Silne tłumienie |
Wysokie tłumienie układu powoduje gładką charakterystykę, ale długi czas odpowiedzi |
 |
|
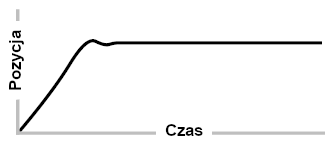
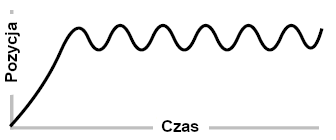
Słabe tłumienie |
W przypadku niskiego tłumienia poprawia się czas odpowiedzi, ale układ początkowo ma charakterystykę oscylacyjną |
 |
|
Tłumienie krytyczne |
Jest najbardziej pożądaną charakterystyką, optymalna w stosunku do czasu reakcji i jakości tłumienia |
 |
|
Drgania |
Charakteryzuje się niegasnącymi oscylacjami o stałej amplitudzie |
 |
|
Chattering |
Wysoko częstotliwościowe drgania o niskiej amplitudzie, zazwyczaj słyszalne w układzie |
 |
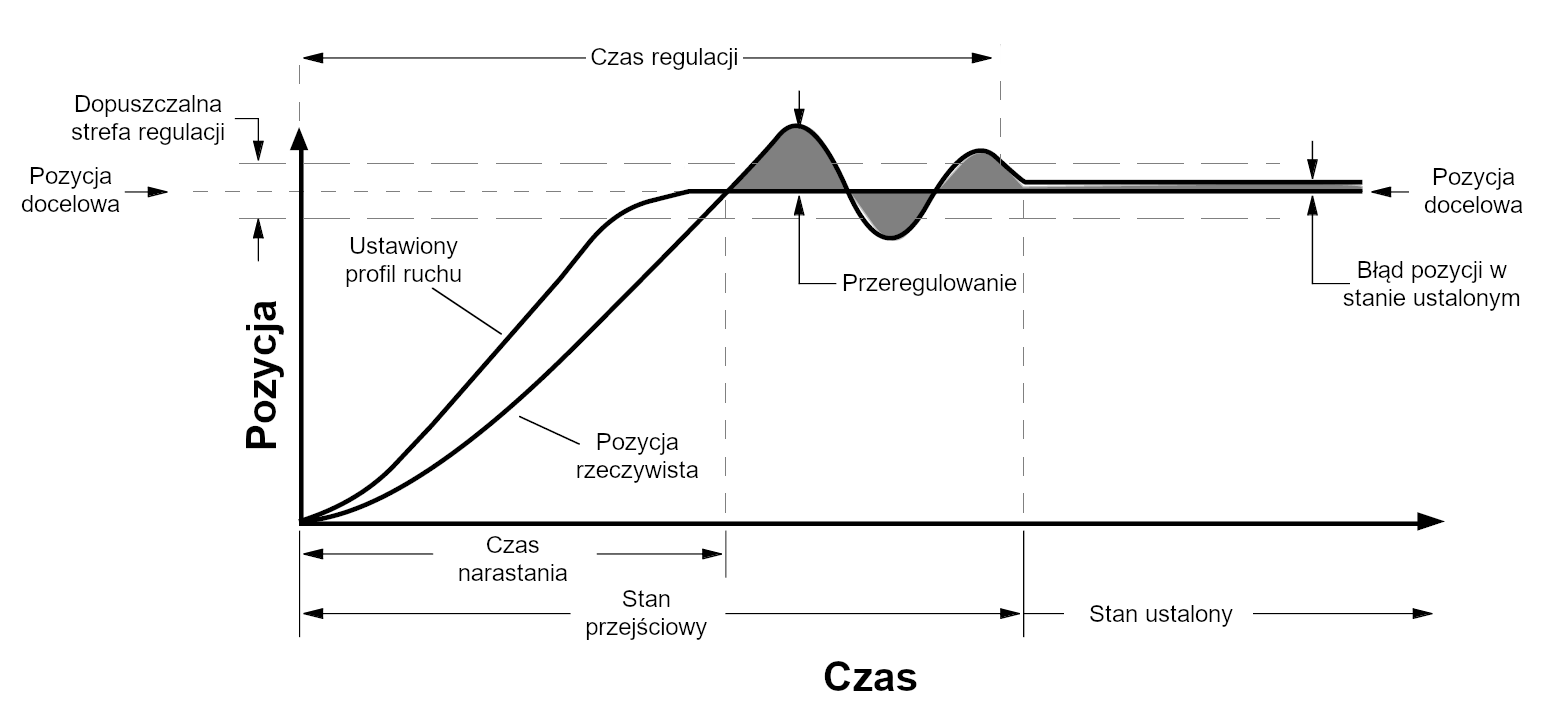
Przed kontynowaniem tematyki strojenia, wyjaśnijmy sobie parę podstawowych pojęć związanych z układami automatyki.
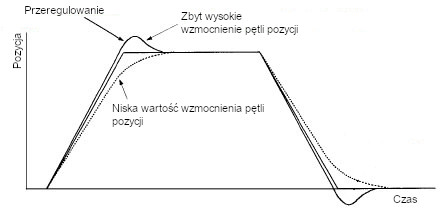
Przeregulowanie – maksymalna amplituda, jaką osiągnęła wartość rzeczywista w stosunku do docelowej. Zazwyczaj wyraża się procentowo.
Czas narastania – czas, jaki potrzebuje układ automatyki na dotarcie do ustalonej wartości.
Czas regulacji – czas, w którym rzeczywisty profil ruchu dotrze do pozycji docelowej i zawiera się w ustalonym błędzie pozycji.
Sterowanie w zamkniętej pętli sprzężenia zwrotnego
Regulacja będzie opierać się na odpowiednim doborze parametrów zamkniętej pętli sprzężenia zwrotnego. W przypadku serwonapędu Unitronics wygląda ona następująco:
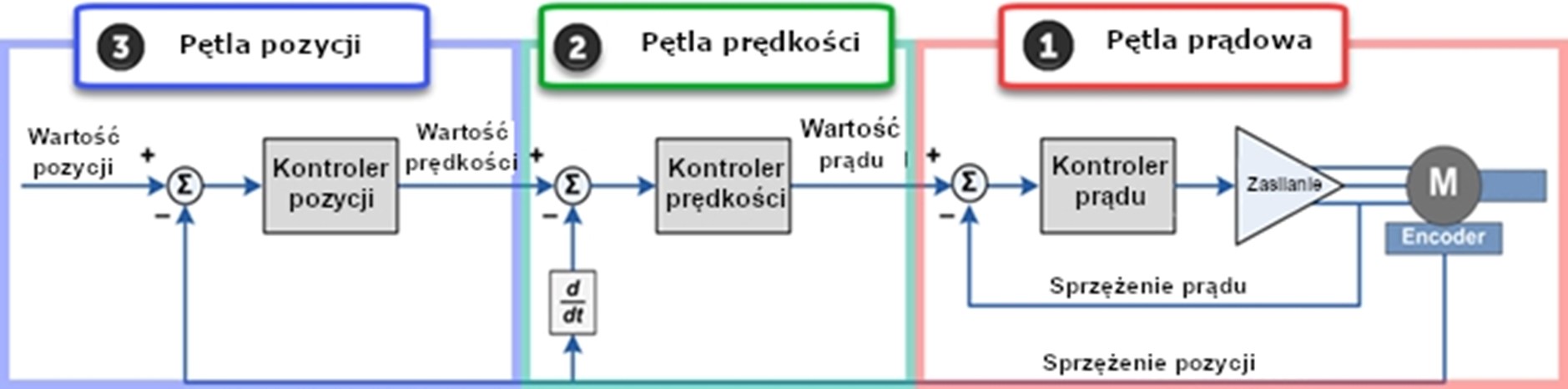
Aktualna pozycja, prędkość czy moment obrotowy serwosilnika jest sygnałem zwrotnym do porównania z sygnałem sterującym i obliczany jest występujący uchyb. Pozwala to na precyzyjne pozycjonowanie i korekcje profilu ruchu obrotowego lub liniowego w celu ograniczenia dewiacji spowodowanych np. bezwładnością układów mechanicznych czy obiektów wchodzących w skład systemu ruchowego. Sprzężenie zwrotne jest realizowane przy pomocy enkodera, który wykrywa zmiany położenia kątowego wału i przekazuje informację do serwosterownika. W czasie rzeczywistym serwosterownik wykonuje zmiany parametrów pracy w taki sposób, aby system spełniał żądane wymagania.
Parametry regulacji położenia i prędkości
Podstawowymi parametrami strojenia w serwonapędach Unitronics są wzmocnienie i sztywność układu. Zagłębiając się w sposób działania możemy podzielić wzmocnienie na:
- Wzmocnienie pętli pozycji,
- Wzmocnienie pętli prędkości.
Wzmocnienie pętli pozycji (Pn104) używane w regulacji położenia odpowiada za odzwierciedlenie pozycjonowania układu. Im większa wartość tym czas pozycjonowania będzie krótszy, ale zbyt duża wartość może doprowadzić do przeregulowań i występowania wibracji w układzie. Z drugiej strony niska wartość wzmocnienia pozycji poprawi sztywność serwonapędu.
W przypadku pętli prędkości mamy dwa parametry odpowiedzialne za jej działanie: wzmocnienie (Pn102) i stałą czasową całkowania pętli prędkości (Pn103). Sprawa z wzmocnieniem wygląda podobnie jak w przypadku pętli pozycji.

Natomiast stała czasowa pozwala na skrócenie czasu pozycjonowania i szybkości odpowiedzi, ale oczywiście zbyt niska wartość doprowadzi do występowania wibracji w układzie.
Jak wcześniej wspomnieliśmy drugim istotnym parametrem jest sztywność układu (Pn101). Parametr ten określa szybkość reakcji układu na siły zewnętrzne. Im większa wartość tego parametru, tym napęd lepiej się pozycjonuje, ale również staje się bardziej niestabilny (występują oscylacje), należy tutaj wybrać wartość kompromisową. Sztywność układu działa tylko w przypadku Autotuningu.
Dodatkowo, mamy jeszcze stałą czasową filtru odniesienia momentu obrotowego (Pn105). Filtr może wyeliminować lub zmniejszyć wibracje mechaniczne, ale nieprawidłowe ustawienie tego parametru może również je powodować.
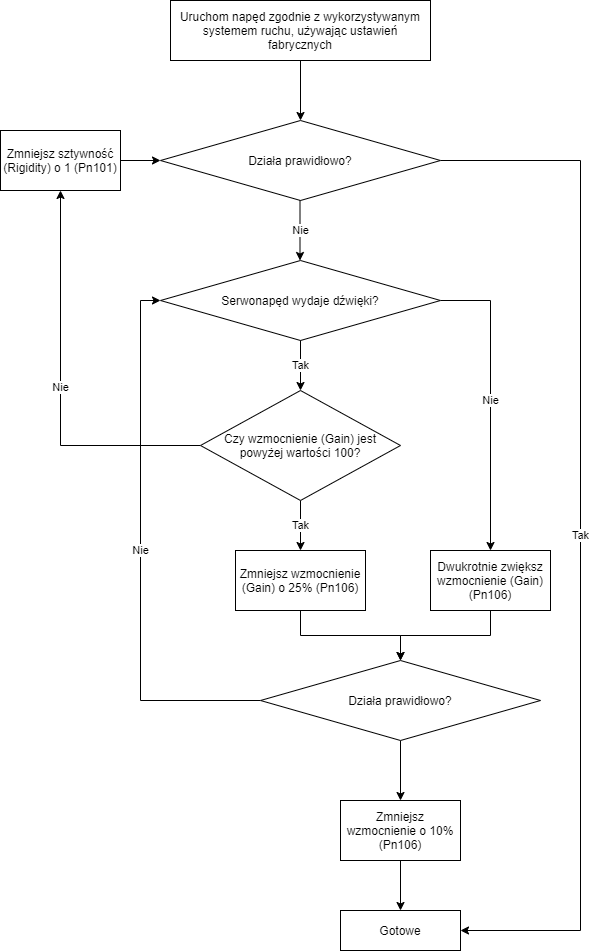
Strojenie za pomocą jednego parametru
Strojenie jedno-parametrowe jest najprostszym sposobem poprawy pracy serwonapędu. Schemat poniżej prezentuje poszczególne kroki do wykonania prawidłowego strojenia serwonapędu.
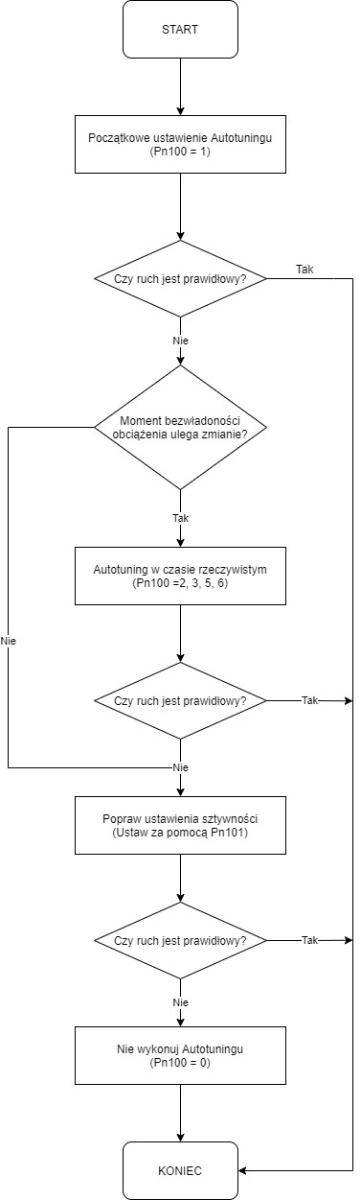
Autotuning w czasie rzeczywistym
W większości przypadków wystarczający jest Autotuning, czyli automatyczna regulacja parametrów sprzężenia zwrotnego bazująca na obliczeniach momentów bezwładności podczas ruchu w czasie rzeczywistym. Dzięki temu wzmocnienie zmienia się w zależności od sztywności obciążenia. Autotuning może być nie efektywny w kilku przypadkach:
- Prędkość silnika jest poniżej 100 obr/s,
- Przyśpieszenie i hamowanie jest poniżej 5000 obr/s,
- Sztywność obciążenia jest niska i z łatwością występują wibracje mechaniczne lub tarcie jest wysokie,
- Następuje gwałtowna zmiana momentu obciążenia.
W wymienionych wyżej sytuacjach jedno-parametrowe strojenie może być niewystarczające i możemy poprawić zachowanie serwonapędu ręcznie za pomocą parametrów: Pn100 – ustawienia Autotuningu w czasie rzeczywistym, Pn101 – ustawienia sztywności.
|
Pn100.0 |
Działanie |
|
|
0 |
Manualne wprowadzanie wartości stosunku bezwładności układu do bezwładności silnika w parametrze Pn106 [%] |
|
|
1 |
Bezwładność nie zmienia się |
Tryb poziomy (bez grawitacji)
|
|
2 |
Bezwładność zmienia się trochę |
|
|
3 |
Bezwładność zmienia się znacząco |
|
|
4 |
Bezwładność nie zmienia się |
Tryb pionowy (wpływ grawitacji)
|
|
5 |
Bezwładność zmienia się trochę |
|
|
6 |
Bezwładność zmienia się znacząco |
|
|
Pn100.1 |
Działanie |
|
0 |
Strojenie ręczne |
|
1 |
Parametry standardowe – automatyczny dobór parametrów regulatorów, kompromis pomiędzy czasem odpowiedzi a stabilnością systemu |
|
2 |
Parametry stabilne – automatyczny dobór parametrów z priorytetem dla stabilności systemu i braku przesterowań |
|
3 |
Parametry wysokiej precyzji – automatyczny dobór parametrów dla jak najkrótszego czasu odpowiedzi |
Ręczne strojenie serwonapędu
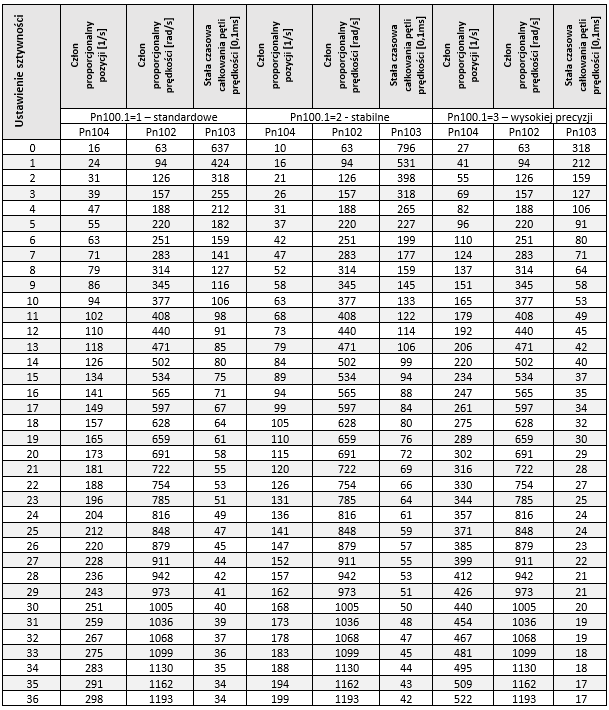
Serwonapędy Unitronics mają wbudowane 37 ustawień sztywności dla strojenia jedno-parametrowego i autotuningu w czasie rzeczywistym. Dobór nastaw sztywności i wzmocnienia serwonapędu (poszczególnych elementów sprzężenia zwrotnego) wykonywany jest zgodnie z tabelą poniżej.
Aby zastosować ręczny tryb strojenia należy zmienić wartość Pn100 na 0000 i zresetować serwosterownik. Natomiast jeśli chcemy wprowadzić ręczny tryb strojenia podczas strojenia jedno-parametrowego lub Autotuningu możemy zacząć od zmiany parametrów Pn102, Pn103 i Pn104 zgodnie z tabelą zachowując wartości wzmocnienia i sztywność układu. Pozwoli to na rozpoczęcie strojenia od początkowych wartości, które są bliskie oczekiwanemu zachowaniu serwonapędu.
Należy wykonać pomiar bezwładności wykorzystując test w Fn009. Otrzymujemy wynik w kgcm2 . Uzyskany wynik dzielimy przez bezwładność serwosilnika (dostępna w katalogu) i zamieniamy stosunek na procenty. Otrzymaną wartość wpisujemy do Pn106.
Sprawdzamy przy jakich wartościach parametru Pn101 układ sterowania zachowuje się najlepiej i wprowadzamy odpowiednie wartości Pn102, Pn103 i Pn104 zgodnie z tabelą powyżej.
Akademia Serwonapędów
Dzięki temu artykułowi dowiedziałeś się w jaki sposób regulować pracę serwonapędów do twojego systemu kontroli ruchu. Jeśli chcesz dowiedzieć się więcej o naszych serwonapędach odwiedź Akademię Serwonapędów, a otrzymasz solidną dawkę wiedzy o:
- konfiguracji serwonapędów
- programowaniu serwonapędów w środowisku Unilogic
- zdalnej diagnostyce
- trybach pracy
- komunikacji EtherCat w serwonapędach
Zachęcamy również do zapoznania się z naszą ofertą serwonapędów Unitronics.