Mimo że serwonapędy najczęściej kojarzone są z precyzyjnym pozycjonowaniem to w wielu aplikacjach przemysłowych wymagane jest jedynie stabilne sterowanie prędkością – bez zaawansowanych funkcji Motion Control.
Sterowanie prędkością obrotową tradycyjnie kojarzone jest z falownikami i silnikami asynchronicznymi. W wielu aplikacjach takie rozwiązanie jest w pełni wystarczające. Coraz częściej jednak w prostych maszynach oraz modernizacjach stosuje się serwonapędy pracujące w trybie prędkości, ponieważ mamy:
- znacznie większą stabilność przy niskich obrotach,
- lepszą dynamikę przyspieszania i hamowania,
- wyższy moment przy małych prędkościach,
- precyzyjną kontrolę przy zmiennym obciążeniu.
W bardziej zaawansowanych aplikacjach możliwe jest wykorzystanie trybów mieszanych, w których sterowanie pozycją współpracuje z ograniczeniami prędkości wynikającymi z sygnału analogowego.
Zasada działania
W trybie prędkości (Speed Mode) serwonapęd nie realizuje zadanego przemieszczenia, lecz utrzymuje określoną prędkość obrotową silnika. Wartość zadana może być określona na dwa sposoby:
- zewnętrznym sygnałem analogowym,
- wpisaniem wartości prędkości bezpośrednio w parametrze napędu.
W artykule skupiamy się na sterowaniu analogowym, ale warto wiedzieć, że napęd może pracować również w trybie stałej prędkości zadanej parametrem.
W serwonapędach Elmatic wejście analogowe pracuje wyłącznie w trybie napięciowym -10 – 10 V. Obsługa ujemnej wartości napięcia pozwala na regulacje kierunku obrotów na podstawie wartości analogowej. Natomiast jeśli wykorzystujemy standardowy zakres 0-10V to nic nie stoi na przeszkodzie, aby wywołać zmianę kierunku przez zmianę stanu wejścia cyfrowego.
Wartość napięcia podanego na wejście analogowe jest liniowo przeliczana na zadaną prędkość obrotową według zakresu określonego w parametrach napędu.

Zależność jest liniowa i przewidywalna, co upraszcza integrację z PLC lub regulację ręczną.
Podłączenie sterowania analogowego
Analogicznie jak we wcześniejszych przykładach będziemy potrzebować sygnału S-ON (1) żeby zezwolić na ruch serwonapędu. Poza tym w podstawowym sterowaniu prędkością wystarczy źródło sygnału analogowego, który może stanowić potencjometr albo wyjście analogowe w PLC. Chociaż warto też dodać wejście SpdDirSel (26), które pozwoli za pomocą przełącznika lub wejścia cyfrowego zmieniać kierunek obrotów.
Rozważymy oba przypadki sterowania. W związku z tym poniżej znajdziecie dwa schematy podłączenia.
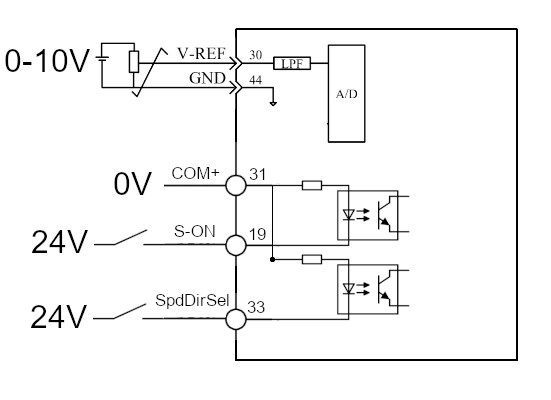
Schemat sterowania prędkością za pomocą potencjometru
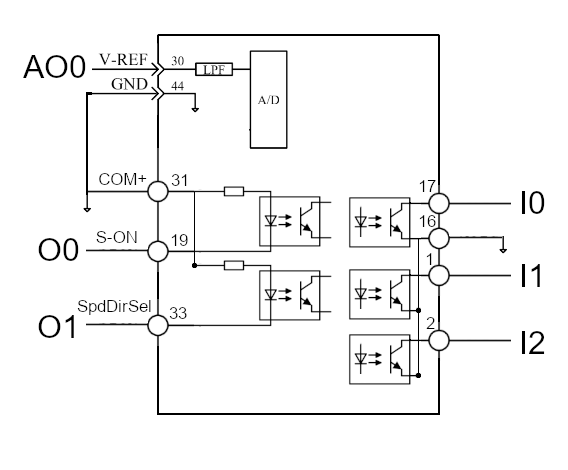
Schemat sterowania prędkością za pomocą wyjścia analogowego w PLC
Przy sterowaniu z PLC należy zapewnić wspólną masę pomiędzy wyjściem analogowym sterownika a wejściem analogowym serwonapędu.
Dodatkowo warto wspomnieć o sygnałach wyjściowych, które są powiązane z trybem sterowania prędkością:
- V-CMP (4) – prędkość silnika zgodna z zadaną prędkością
- V-LT (8) – serwosilnik osiągnął maksymalną prędkość, może być to limit narzucony przez nas za pomocą odpowiedniego parametru
- V-Arr (19) – osiągnięcie zadanej prędkości (pojedynczy impuls)
Konfiguracja serwosterownika
Grupa parametrów odpowiadająca za sterowanie prędkością to P05, jednak zanim do nich przejdziemy musimy zmienić jeszcze tryb sterowania i skonfigurować DI/DO.
- Krok 1 – wybór trybu pracy
W P01-00 konfigurujemy tryb pracy serwa. Jak zauważycie tryb sterowania prędkością (Speed Mode) występuje 4 razy. Wynika to z faktu, że serwo pozwala na pracę w kilku trybach jednocześnie przy czym jako główny tryb sterowania będzie wykorzystywany pierwszy w kolejności.
W tym przykładzie P01-00 = 0 co pozwala na pracę wyłącznie w trybie sterowania prędkością. Natomiast gdybyśmy wybrali 4 (Position Mode – Speed Mode) to sterujemy pozycją impulsowo, ale serwo bierze pod uwagę wartość źródła analogowego i limity przy prędkości (częstotliwość impulsów nie definiuje prędkości).
- Krok 2 – konfiguracja I/O
Sygnał S-ON jest domyślnie przypisany do DI5, czyli P02-12 = 1, natomiast sygnał SpdDirSel pozwalający na zmianę kierunku obrotów przypiszemy pod DI6, czyli P02-14 = 26
Będziemy korzystać z wejścia analogowego AI1. Parametry P02-50 – 54 definiują zachowanie wejścia analogowego, m.in. możemy ustawić offset, filtr czasowy, martwą strefę czy kompensację dryftu. Jednak najważniejszy będzie parametr P02-80 określający prędkość odpowiadającą wartości 100%, co w naszym przypadku będzie 3000 RPM.
Wspomniane sygnały wyjściowe przypiszemy do kolejnych wyjść, więc V-CMP (DO2): P03-02 = 4, V-LT (DO3): P03-04 = 8.
- Krok 3 – konfiguracja trybu prędkości
Teraz możemy przejść do ustawień trybu prędkości. Najważniejszy będzie wybór źródła sygnału, czyli parametr P05-00. Niezależnie czy źródłem sygnału będzie potencjometr czy PLC wybieramy AI1, czyli P05-00 = 1.
Serwonapęd Elmatic pozwala na wybór dwóch źródeł sygnału prędkości. Jest to przydatna opcja gdy chcemy realizować dojazd z maksymalną prędkością a pracę już z regulowaną prędkością (wtedy wystarczy pod przycisk przypisać przełączanie źródła).
Następnie P05-02 = 0, tylko kanał A (AI1) będzie stanowić źródło naszego sygnału. W zasadzie ustawienie powyższych parametrów pozwoli już na pracę w trybie sterowanie prędkością z źródła analogowego.
P05-05 i P05-06 pozwalają na ustawienie czasu przyśpieszania/hamowania serwonapędu, domyślna wartość to 0 ms, czyli nasz napęd od razu reaguje na zmiany w prędkości. W przypadku poruszania elementami o znacznej bezwładności zalecałbym wydłużenie tego czasu.
P05-07 dostosujemy do limitu mechanicznego naszego silnika, czyli 5000 RPM, natomiast limity ruchu do przodu i tyłu dostosujemy do wartości znamionowej, czyli P05-08 = P05-09 = 3000.
Serwonapęd będzie zawsze starał się utrzymać zadaną prędkość, ale jak wiemy oddziaływanie zewnętrznych sił może spowodować wahania wartości. Z tego względu, aby sygnał V-CMP cały czas nie zmieniał stanu dodamy mu zakres tolerancji w P05-16 = 20 RPM.
Podsumowanie
Po zakończeniu konfiguracji parametrów oraz podłączeniu sygnałów możemy przejść do testu pracy napędu w trybie prędkości. Będziemy wykorzystywać wyjście analogowe w PLC Unitronics. Użyty program do sterowania oraz wizualizację możecie pobrać pod tym linkiem (LINK).
(film z testów)
Sterowanie prędkością to jednak tylko jeden z możliwych trybów pracy serwonapędu. W niektórych aplikacjach ważniejsza od prędkości jest kontrola momentu, na przykład przy utrzymywaniu stałego naprężenia materiału lub przy procesach wymagających ograniczenia siły.
W kolejnym artykule pokażemy, jak wykorzystać sterowanie momentem w serwonapędach Elmatic, kiedy taki tryb pracy ma sens oraz jak skonfigurować go w praktyce (LINK).
Jeśli chcesz dowiedzieć się więcej o naszych serwonapędach odwiedź Akademię Serwonapędów, a otrzymasz solidną dawkę wiedzy o:
- konfiguracji serwonapędów
- programowaniu serwonapędów w środowisku Unilogic
- zdalnej diagnostyce
- trybach pracy
- komunikacji EtherCat w serwonapędach
Zachęcamy również do zapoznania się z naszą ofertą serwonapędów Unitronics i serwonapędów Elmatic.



























