

W jaki sposób obciążenie robota wpływa na jego pracę?
Konfiguracja robota Universal Robots
Tekst jest kontynuacją wpisu opisującego w jaki sposób poprawnie ustawić punkt TCP w robotach Universal Robots?
Robot Universal Robots to manipulator mający 6 stopni swobody, każdy ze stopni powiązany jest z pojedynczym serwomechanizmem. Wspólna praca wszystkich serwomechanizmów umożliwia stworzenie wybranej trajektorii ruchu końcówki narzędzia robota. Z punktu widzenia użytkownika końcowego to prosty ruch, jednak podczas tego procesu w czasie rzeczywistym wykonywane są obliczenia matematyczne odpowiedzialne za wyznaczenie pozycji poszczególnych przegubów, ich prędkości czy przyspieszeń. Kontrolę nad całym procesem sprawują odpowiednie regulatory, które muszą pracować w swoim zakresie pracy. Do wyznaczenia dynamiki ruchu robota potrzebna jest informacja o jego aktualnym obciążeniu, w końcu producent nie wie co fizycznie będzie podłączone do kołnierza narzędzia robota. Pod każdą z nazw robota UR3, UR5, UR10* kryje się jego maksymalny udźwig, odpowiednio 3, 5 i 10 kg. Pytanie, czy zanim cokolwiek podniesie robot jest już na starcie obciążony? Oczywiście odpowiedź jest twierdząca, gdyż aby cokolwiek robot mógł podnieść do jego kołnierza narzędziowego musi zostać podłączony jakiś efektor. Ten efektor ma swoja wagę i tę wagę należy podać w ustawieniach konfiguracyjnych robota. Parametr ten nazwany jest obciążeniem „Payload”, jest on wyrażony w kg. Zatem rzeczywisty udźwig robota można zdefiniować prostym wzorem:
rzeczywisty udźwig robota = udźwig - (waga chwytaka)
Oznacza to iż im cięższy chwytak tym relatywnie mniej możemy podnieść narzędziem robota. Udźwig ten nie jest w jakikolwiek sposób uzależniony od położeń członów robota. Aktualne obciążenie robota „Payload” wyraża się wzorem:
Payload = waga chwytaka + waga podnoszonego detalu
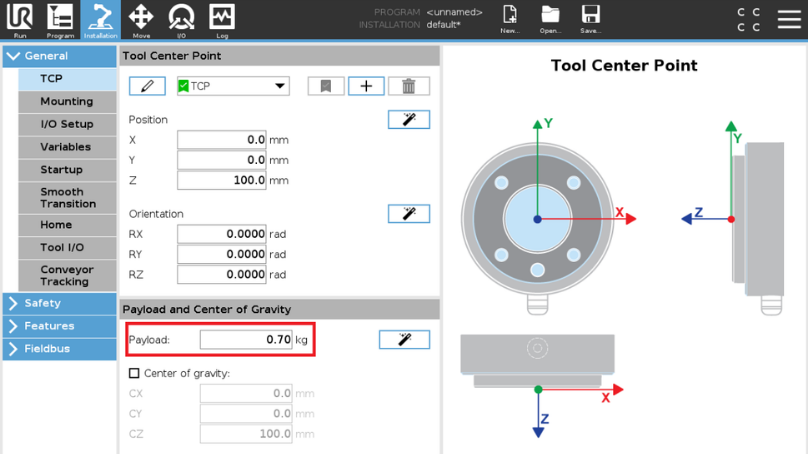
Przy starcie programu i pustym chwytaku aktualny „Payload” to waga samego chwytaka, i tę wartość w kg wpisujemy w odpowiednim polu (rys. 1). Należy pamiętać iż podczas podnoszenia przedmiotu należy zmodyfikować aktualne obciążenie zgodnie z powyższym wzorem (to samo tyczy się sytuacji z odkładaniem przedmiotu), możemy w tym celu użyć instrukcji „Set” w programie robota.
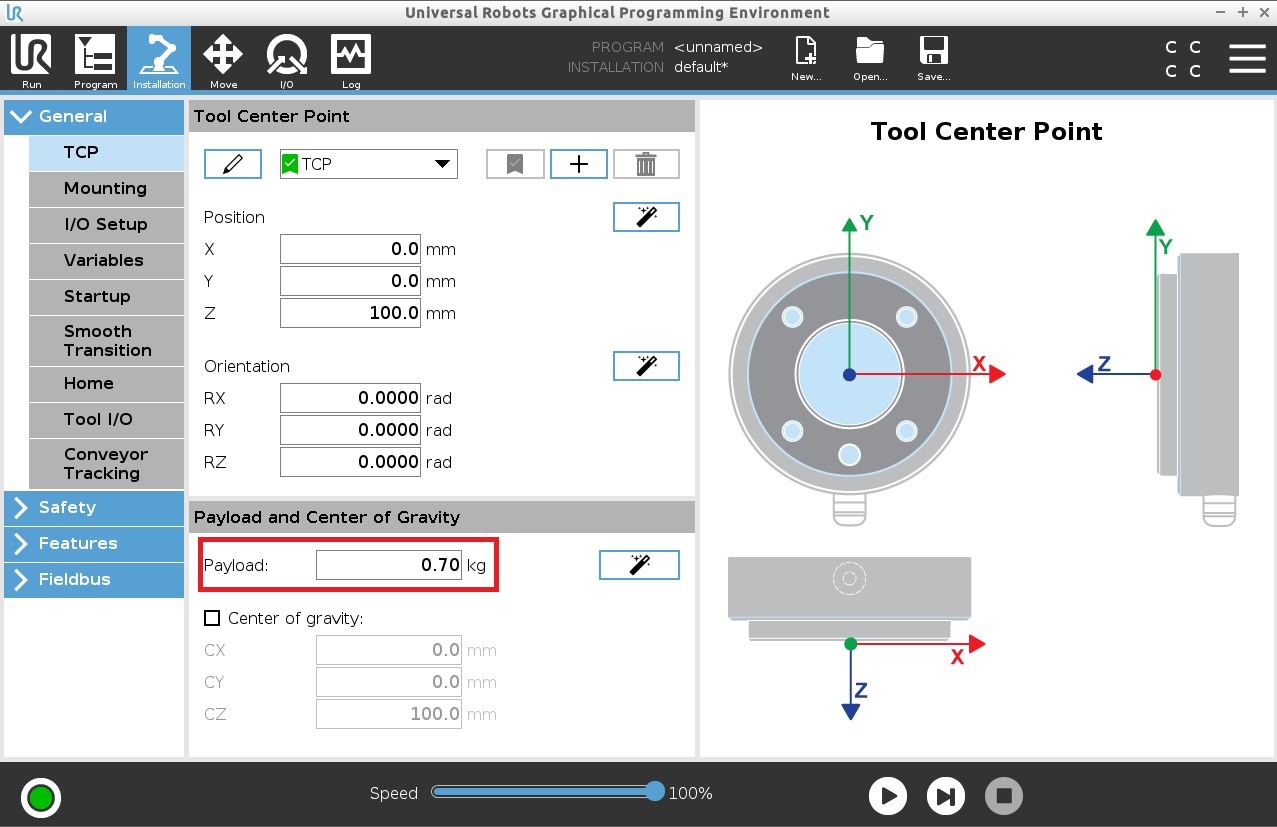
Rysunek 1 Ustawienie aktualnego obciążenia robota
Ustawienie środka ciężkości dla obciążenia robota (CoG)
Do poprawnej pracy regulatorów robot potrzebuje precyzyjnej informacji o umiejscowieniu środka ciężkości aktualnego obciążenia robota. Jest to na tyle istotny parametr iż wpływa pośrednio również na rzeczywisty udźwig robota. Źle dobrane parametry środka ciężkości mogą wygenerować nieskompensowane siły i momenty sił na członach robota, które dodatkowo wpłyną niekorzystnie na proces regulacji w trakcie ruchu robota. Mogą także generować niepotrzebne obciążenia na poszczególnych napędach skracając ich żywotność. Z tego względu należy szczególnie zwrócić uwagę na poprawność wyznaczenia tego parametru. Fabryczną pozycją punktu środka ciężkości „Centre of gravity” jest początek układu współrzędnych narzędzia robota. Parametr ten zobrazowany jest jako wektor 3 elementowy [Cx, Cy, Cz] wyznaczany w układzie współrzędnych narzędzia robota (rys. 2).
Cx – odległość względem osi x wyrażona na karcie w jednostkach [mm]
Cy - odległość względem osi y wyrażona na karcie w jednostkach [mm]
Cz - odległość względem osi z wyrażona na karcie w jednostkach [mm]
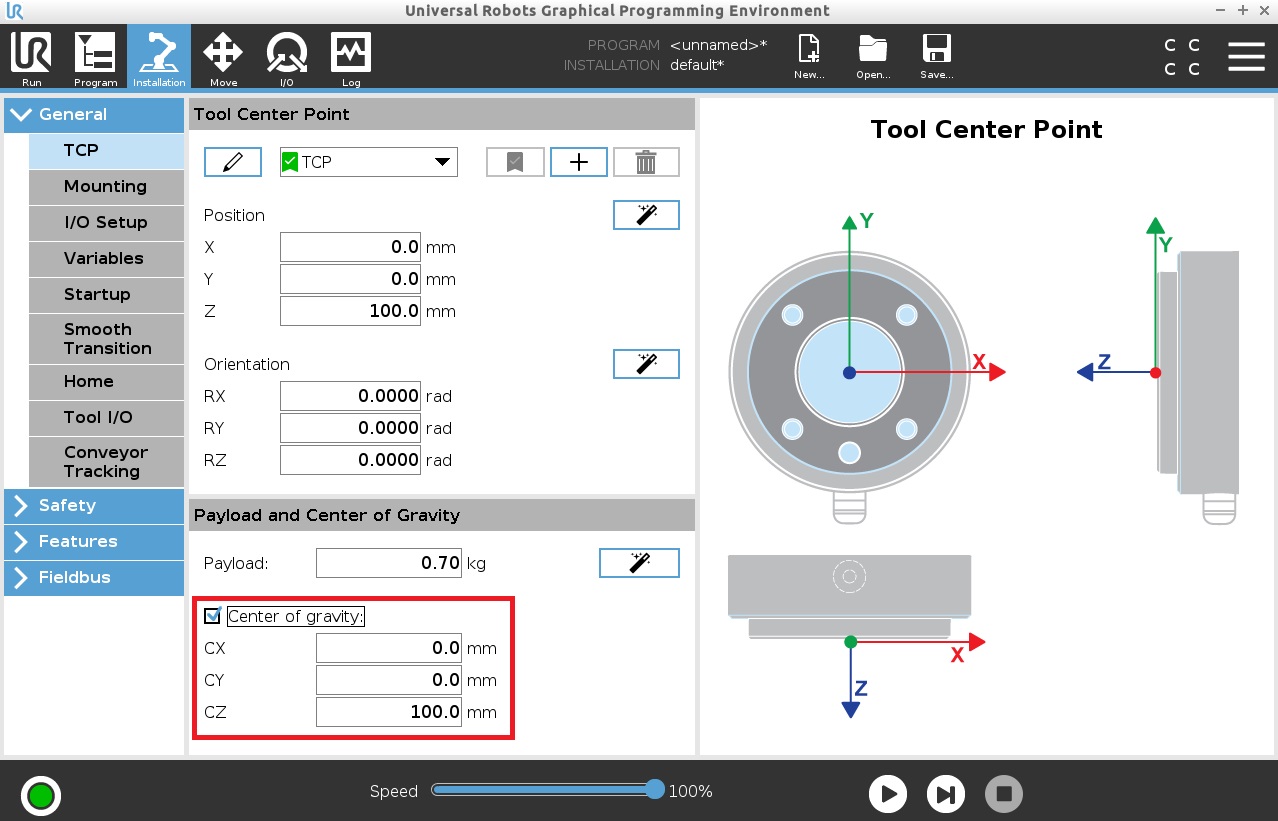
Rysunek 2 Ustawienie pozycji środka ciężkości dla obciążenia robota
Do poprawnego wyznaczenia środka ciężkości można wykorzystać dane z karty katalogowej chwytaka. Jeżeli takiego parametru nie mamy możemy wyznaczyć środek ciężkości za pomocą środowiska 3D (np. SolidWorks).
Producent w nowej serii robotów e-Series udostępnił użytkownikom gotową funkcję automatycznego wyznaczania obciążenia „Payload” oraz środka ciężkości „CoG”. Jest to możliwe do realizacji dzięki zastosowaniu dodatkowego czujnika siły wbudowanego bezpośrednio w kołnierz narzędzia robota. Funkcja ta nosi nazwę „Payload Estimation” (rys. 3) i można ją wywołać poprzez przycisk „czarodziejskiej różdżki” znajdującej się po prawej stronie od pola „Payload”.
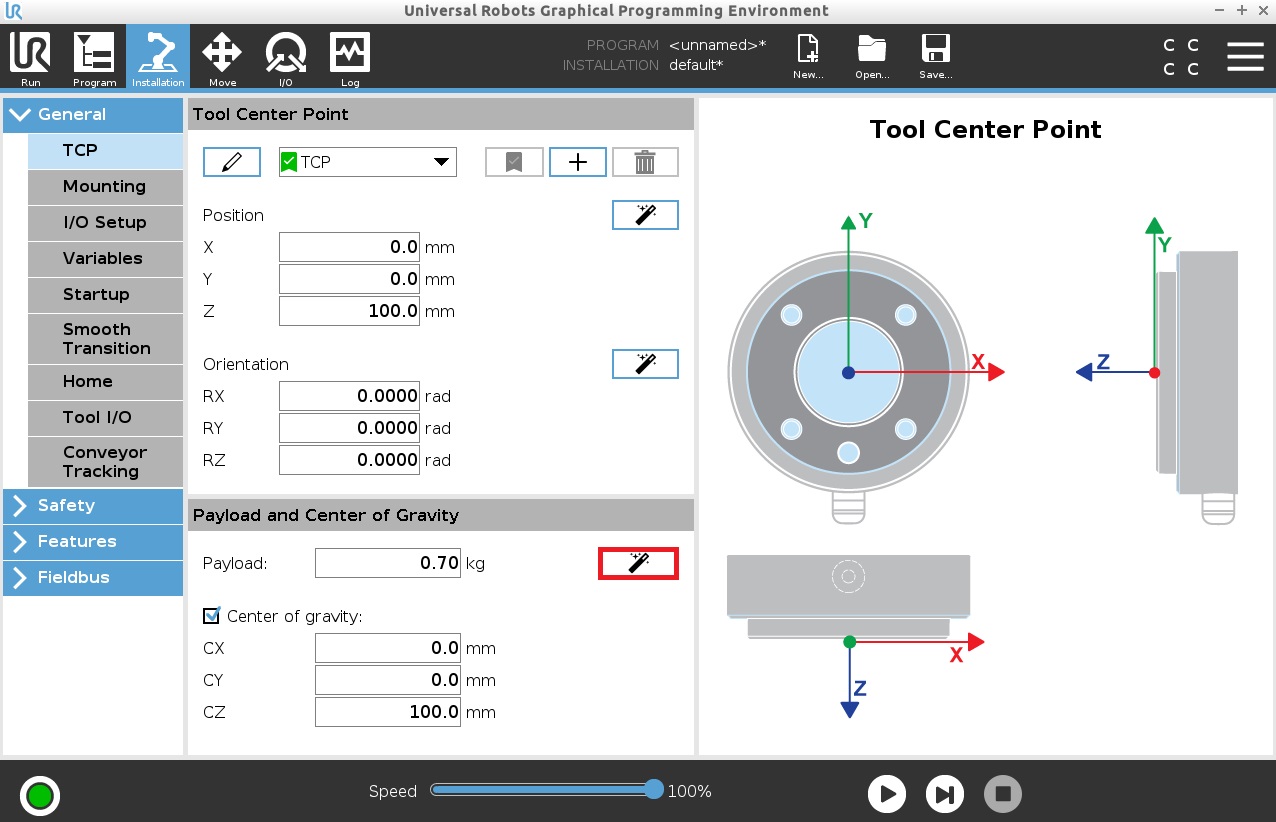
Rysunek 3 Uruchomienie funkcji „Payload Estimation"
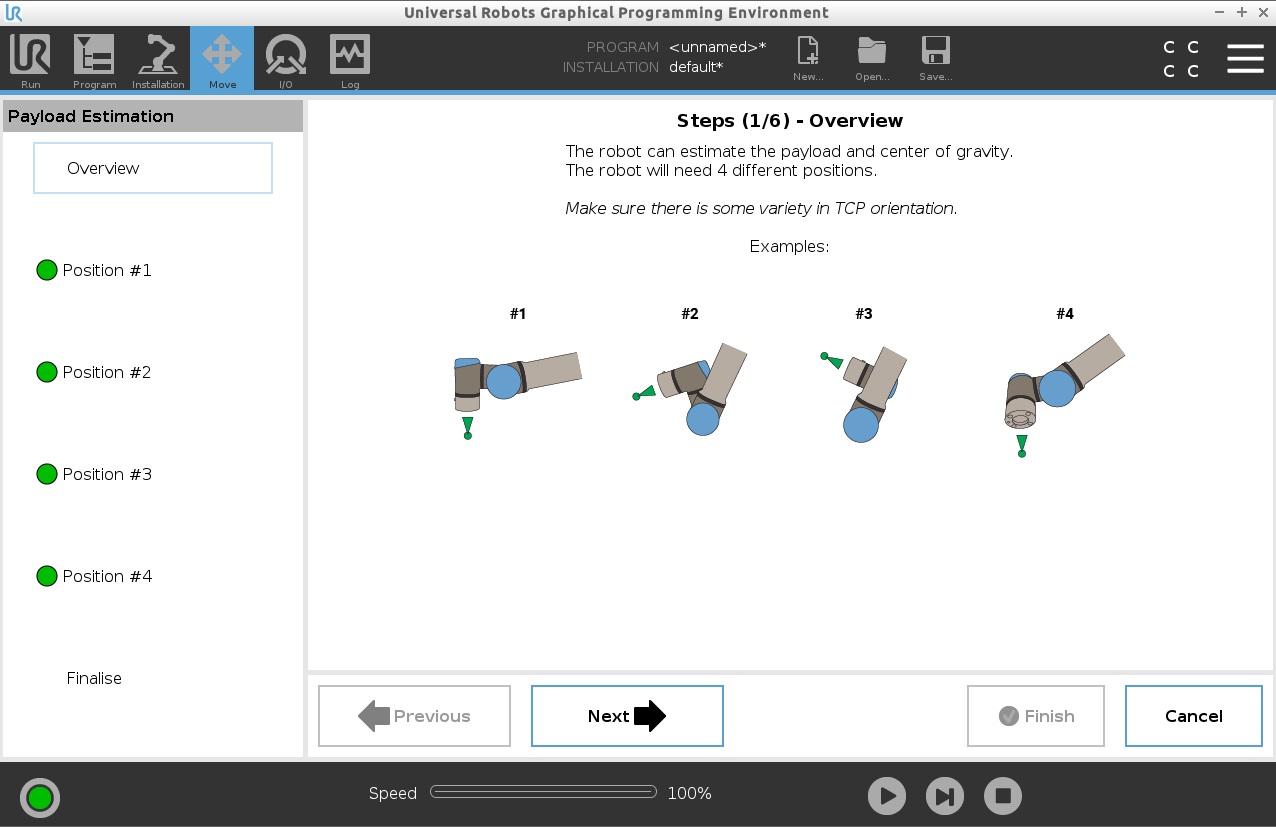
Rysunek 4 Funkcja automatycznego wyznaczenia obciążenia i środka ciężkości
Automatyczne wyznaczenie „Payload” oraz „CoG” realizuje się poprzez wyzaczenie 4 pozycji robota „Waypoints” w ten sposób aby narzędzie przyjmowało różne orientacje w przestrzeni roboczej manipulatora. W każdej z pozycji mierzone są siły, a na końcu dostajemy wynik w postaci współrzędnych punktu „CoG” oraz szacowanej wagi obciążenia robota „Payload” (rys. 5). Zmiany akceptujemy przyciskiem „Finish”.
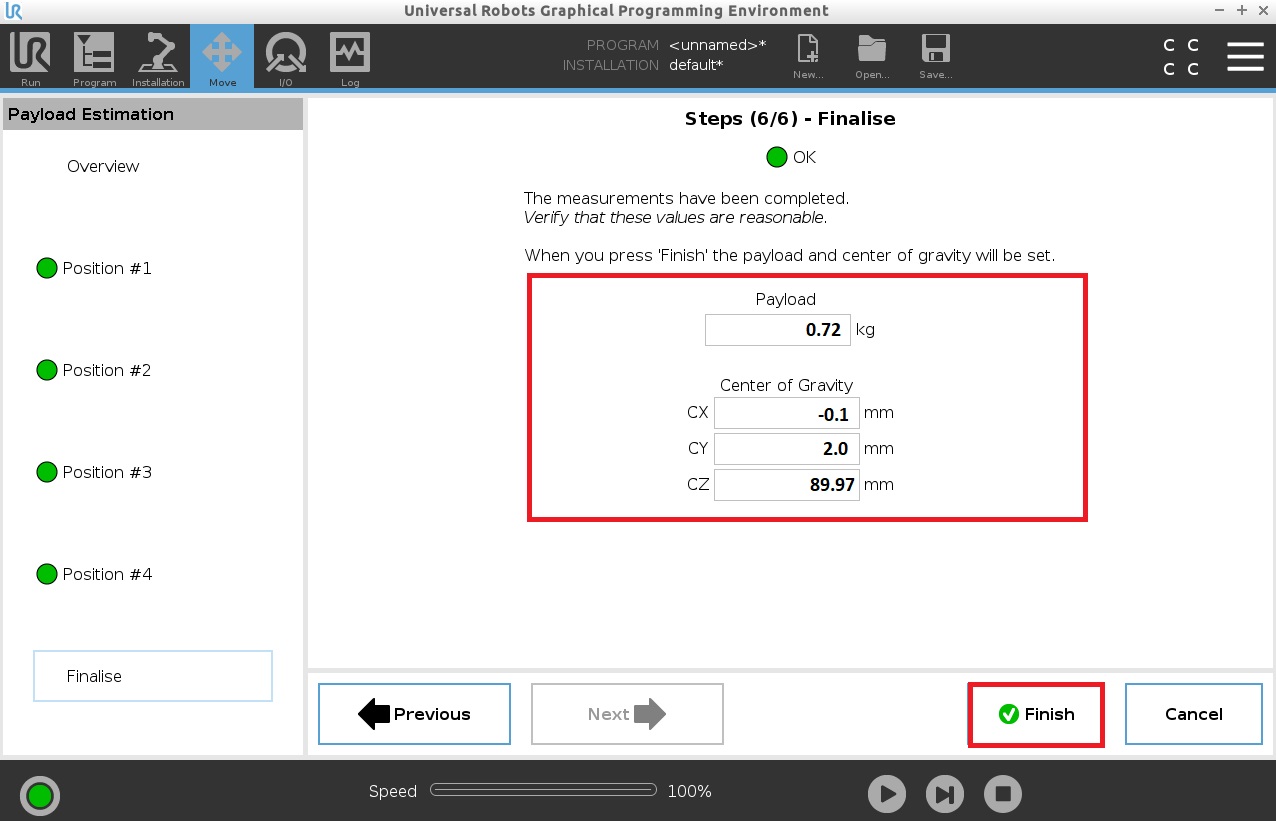
Rysunek 5 Wyniki otrzymane po kalkulacji funkcji „Payload Estimation”
Tak jak w przypadku parametru „Payload” należy zwrócić uwagę iż podczas pochwycenia jak i odłożenia przedmiotu zmieniają się wypadkowe współrzędne środka ciężkości. Ma tu miejsce zasada sumowania poszczególnych współrzędnych środków ciężkości wszystkich elementów wchodzących w skład obciążenia ramienia robota. W programie robota parametr ten możemy modyfikować za pomocą funkcji skryptowej „Set_payload_CoG”, np. set_payload_cog([0,0,0.2)], oznacza zmianę współrzędnych środka ciężkości na Cx = 0, Cy = 0, Cz = 200 mm.
Jak już wcześniej zostało napisane parametr „CoG” wpływa na rzeczywisty udźwig robota. Ogólna zasada mówi o tym iż im dalej oddalony jest wypadkowy środek ciężkości to tym bardziej zmniejsza nam się rzeczywisty udźwig robota. Przykładowe wykresy wpływu przemieszczenia środka ciężkości na maksymalne obciążenie robota można znaleźć w dokumentacji technicznej udostępnionej przez Universal Robots (rys. 6).
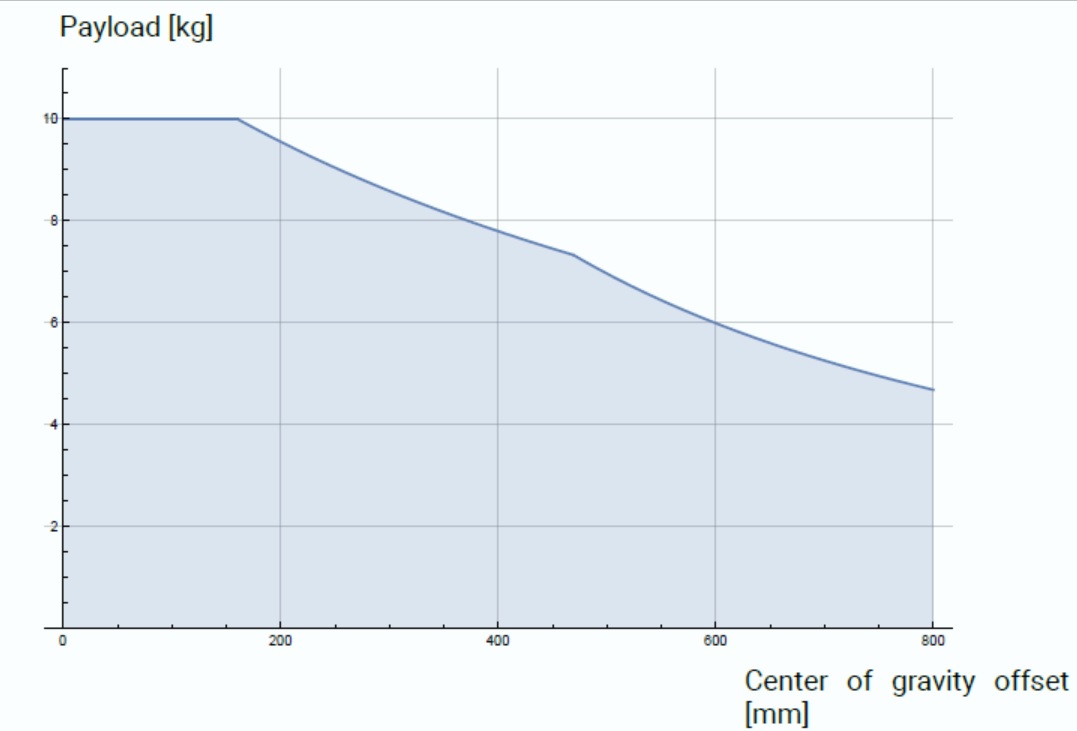
Rysunek 6 Wpływ przesunięcia środka ciężkości na maksymalny udźwig robota UR10
Z powyższego rysunku wynika iż przy oddaleniu środka ciężkości obciążenia o 200 mm od kołnierza narzędziowego robota, rzeczywisty udźwig zmalał do około 9 kg (wyjściowy parametr udźwigu to 10 kg). Analogicznie sytuacja tyczy się mniejszych wersji robota Universal Robots (rys. 7 i 8).
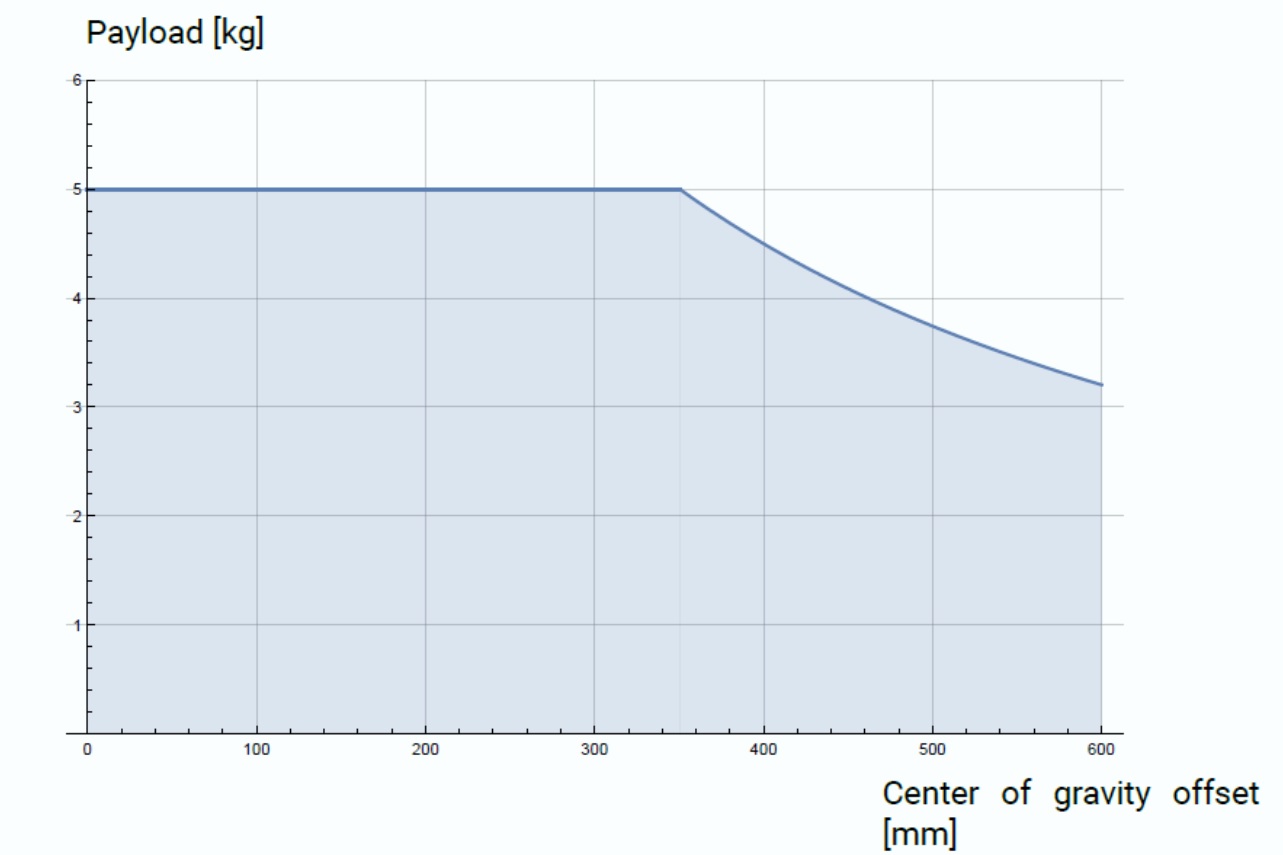
Rysunek 7 Wpływ przesunięcia środka ciężkości na maksymalny udźwig robota UR5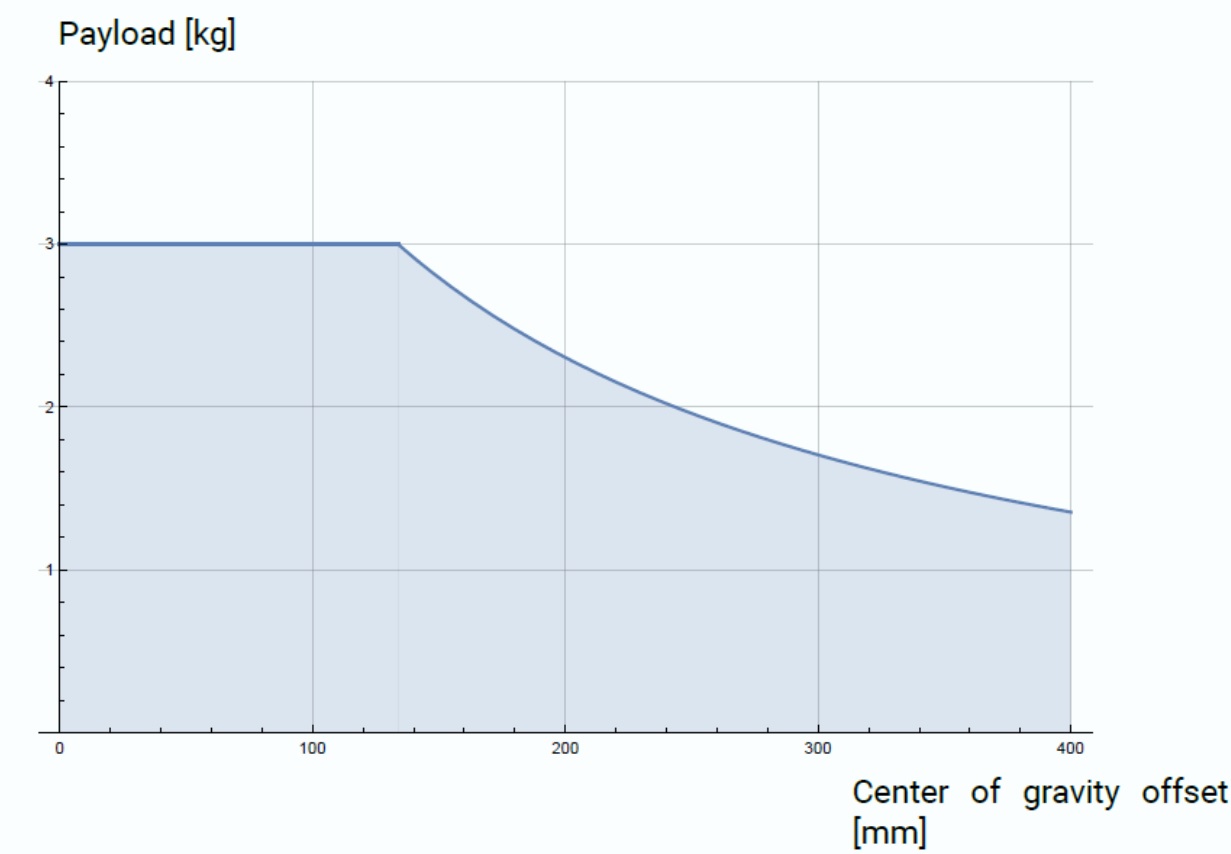
Rysunek 8 Wpływ przesunięcia środka ciężkości na maksymalny udźwig robota UR3
Podsumowanie
Powyższe wskazówki dotyczące podstawowej konfiguracji parametrów robota umożliwią jego późniejszą bezproblemową pracę. Po zakończeniu procesu można przeprowadzić krótki test poprawności działania manipulatora. Do całego procesu należy użyć trybu swobodnego prowadzenia końcówki robota (funkcja dostępna w robotach współpracujących). Metoda polega na wciśnięciu przycisku „Freedrive” znajdującego się z tyłu panelu nauczania robota „Teach pendant” (rys. 8 i 9) oraz obserwację jak zachowuje się końcówka narzędzia robota.
|
|
|
|
|
Rysunek 9 Przycisk "Freedrive" w panelu sterującym robota generacji CB3.1 |
|
Rysunek 10 Przycisk "Freedrive" w panelu sterującym robota e-Series |
Jeżeli po wciśnięciu przycisku „Freedrive” końcówka robota zachowuje się stabilnie, nie występuje ruch czy obrót któregoś z przegubów robota oznacza to iż parametry konfiguracyjne dobrane są poprawnie. Operację można powtórzyć dla różnych ułożeń narzędzia w przestrzeni robota. W przypadku zaobserwowania ruchu należy ponownie zweryfikować całą procedurę konfiguracji.
- Od 18.05.2021 dostępny jest robot UR10e ze zwiększonym do 12,5 kg udźwigiem. Więcej informacji w artykule.
![]()