Przewodnik po chwytakach i efektorach Robotiq
Planując robotyzację wiemy mniej więcej jaki proces chcemy robotyzować i wybraliśmy robota o odpowiednim udźwigu. Ale bez efektora jego ramię jest bezużyteczne. Konieczny jest... chwytak!
Przed jego wyborem odpowiedzmy sobie na 4 podstawowe pytania:
1. Czy będzie bezpieczny?
Aby cobot mógł bezpiecznie działać w towarzystwie człowieka, zarówno on sam, jak i jego peryferia muszą być bezpieczne. To oznacza, że chwytak nie może posiadać żadnych ostrych krawędzi ani punktów przechwycenia. Również w przypadku części detali w razie braku zasilania chwytak nie powinien wypuścić trzymanego przedmiotu. O ile nic się nie stanie w wyniku upuszczenia przez robota kartki papieru, o tyle w przypadku produktów np. kruchych będziemy musieli... cóż, w najlepszym razie posprzątać.
2. W jaki sposób ma chwytać obiekty?
W następnym kroku musimy przemyśleć w jaki sposób robot ma łapać detal oraz co będzie z nim robił. Warto się zastanowić, czy robot będzie musiał łapać detale od góry, czy od boku, ile miejsca jest wokół każdego detalu, czy detal wymaga zmiany chwytu? Czy powinien być chwytany od wewnątrz, czy od zewnątrz? A może za gładką powierzchnię, jak w przypadku arkuszy blachy?
3. Jaki ma mieć udźwig?
Zarówno chwytak, jak i sam robot mają tu określony maksymalny pułap, którego nie należy przekraczać. O ile na udźwig robota składa się zarówno masa chwytaka (i oprzyrządowania dodatkowego) oraz masa detalu, o tyle określając udźwig chwytaka musimy znać jedynie wagę chwytanego przedmiotu. Aby w pełni wykorzystać potencjał robota, udźwig chwytaka powinien być zbliżony do udźwigu robota.
4. Jak bardzo jest zaawansowany?
Niektóre chwytaki są w stanie przekazywać zwrotne informacje robotowi, np. o stanie chwytaka (czy jest otwarty, czy zamknięty), a także o wymiarach detalu (szerokość rozwarcia szczęk). Taka informacja może być przydatna w aplikacjach sortowania, gdzie robot po rozmiarze przedmiotu jest w stanie go zidentyfikować.
Typy chwytaków można podzielić na różne sposoby. Najczęściej stosuje się podział ze względu na sposób zasilania napędu oraz ze względu na wykorzystywane technologie. Zaczynamy od pierwszego:
Zasilanie
Podstawowymi kategoriami są tu:
- zasilanie elektryczne
- zasilanie pneumatyczne
- zasilanie hydrauliczne
 Najczęściej stosowane są pierwsze dwa typy. Chwytaki elektryczne wydają się najłatwiejsze we wdrożeniu, bo nie wymagają instalacji pneumatycznej w zakładzie ani sprężarek. Często nie trzeba nawet prowadzić kabli wzdłuż całego robota, tylko jest on podłączany bezpośrednio do flanszy robota. Przykładowo po prawej, chwytak RG2 od OnRobot.
Najczęściej stosowane są pierwsze dwa typy. Chwytaki elektryczne wydają się najłatwiejsze we wdrożeniu, bo nie wymagają instalacji pneumatycznej w zakładzie ani sprężarek. Często nie trzeba nawet prowadzić kabli wzdłuż całego robota, tylko jest on podłączany bezpośrednio do flanszy robota. Przykładowo po prawej, chwytak RG2 od OnRobot.
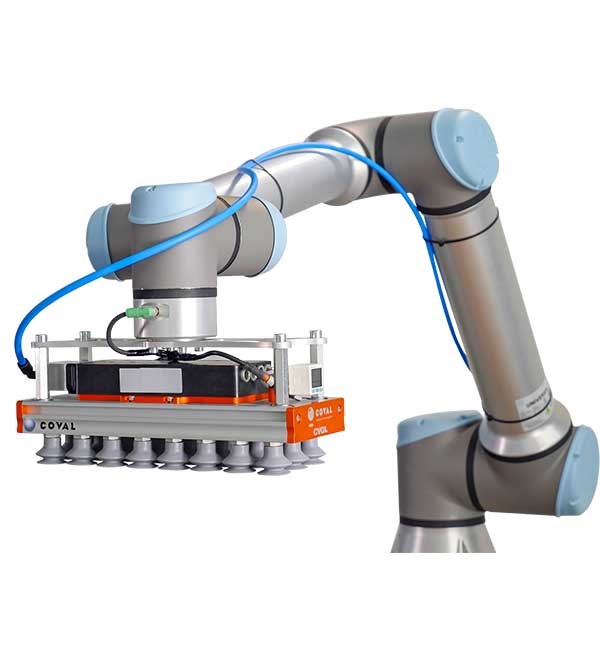 Jeśli chodzi o chwytaki z napędem pneumatycznym, to głównymi zaletami są ich niska cena i lekkość. W przypadku chwytaków podciśnieniowych zasilanie z instalacji pneumatycznej pozwala zmniejszyć masę i gabaryt chwytaka, bo wyeliminowano wbudowany kompresor.
Jeśli chodzi o chwytaki z napędem pneumatycznym, to głównymi zaletami są ich niska cena i lekkość. W przypadku chwytaków podciśnieniowych zasilanie z instalacji pneumatycznej pozwala zmniejszyć masę i gabaryt chwytaka, bo wyeliminowano wbudowany kompresor.
Warto pamiętać, że robot współpracujący może zmieniać swoje miejsce w zakładzie, a chwytak nie powinien ograniczać tej możliwości ze względu na swoje zasilanie.
Ze względu na rzadkość występowania, nie będziemy zajmowali się chwytakami hydraulicznymi w tym artykule.
Technologie
Wyróżniamy 7 podstawowych typów w tym podziale:
- szczękowe
- podciśnieniowe
- adhezyjne
- Bernoulliego
- magnetyczne
- chwytaki typu soft
- specjalne
Chwytak szczękowy
- Liczba palców
Pierwszy podział dotyczy liczby palców. Najbardziej popularne są chwytaki dwu- i trójpalczaste. Chwytaki trójpalczaste są często wykorzystywane w przypadku detali cylindrycznych, gdyż jednocześnie pozycjonują detal. Chwytaki o dwóch palcach najczęściej stosowane są w przypadku obiektów o co najmniej dwóch równoległych bokach odpowiednich do chwycenia. Możliwe są także chwytaki sześciopalczaste i są często wykorzystywane do pracy z gumowymi o-ringami. - Sposób trzymania
- siłowy
- kształtowy
- siłowo-kształtowy
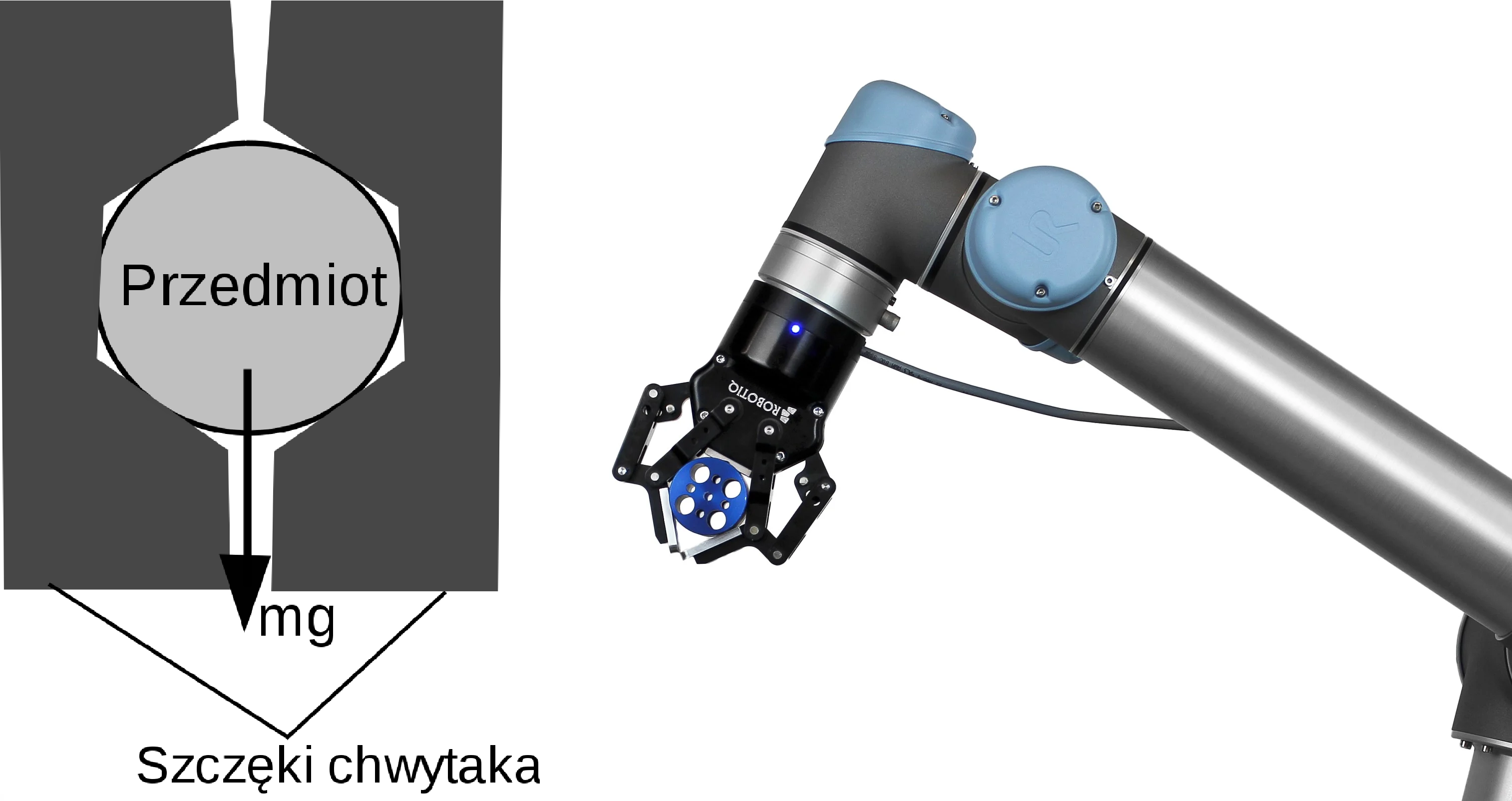
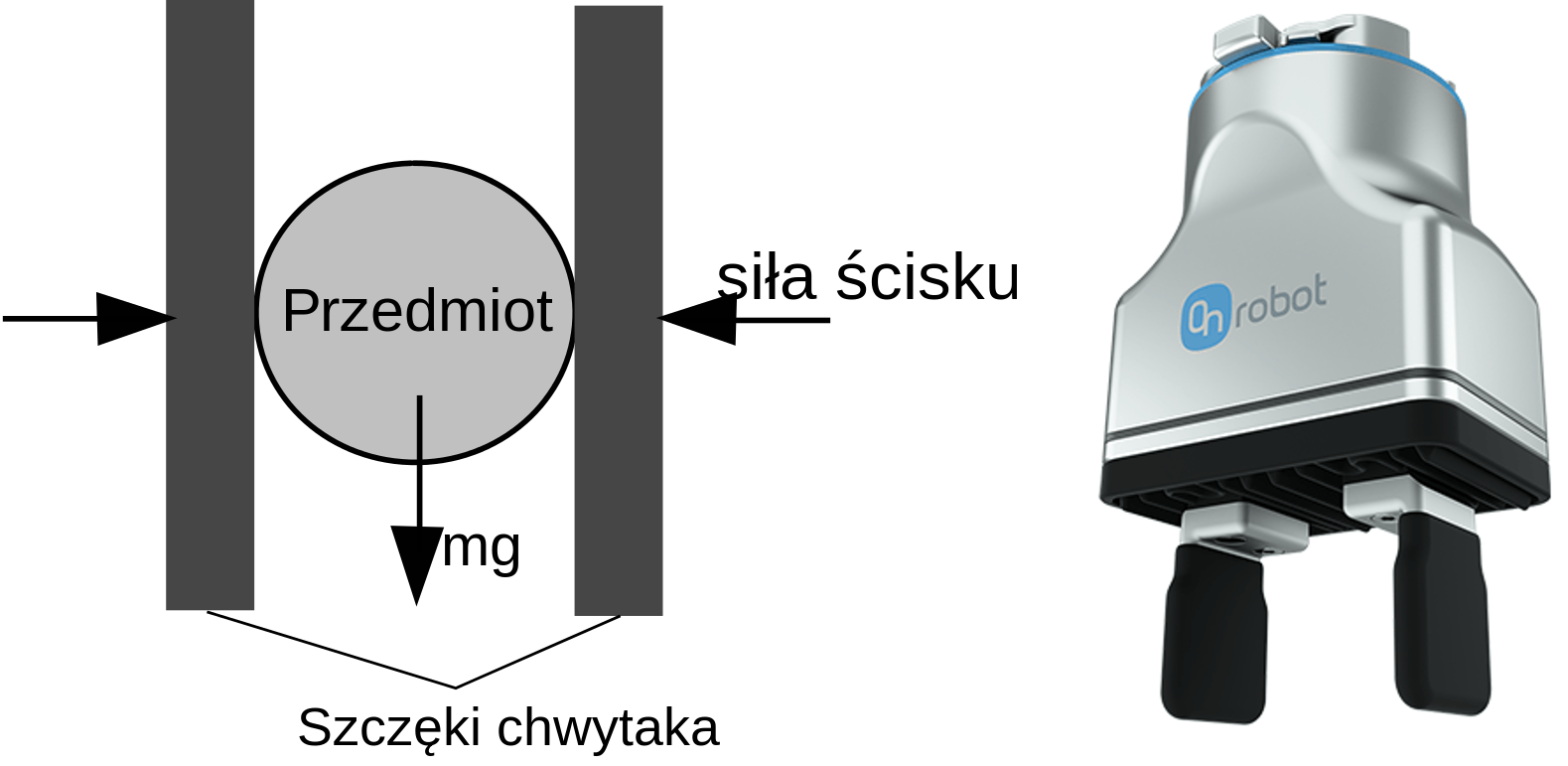 Siłowy sposób trzymania przedmiotu wykorzystuje siłę tarcia między palcami chwytaka, a obiektem. Jednak w przypadku bardzo śliskiego bądź ciężkiego przedmiotu siła wywierana przez palce chwytaka na obiekt może powodować odkształcenia i uszkodzenia detalu. Po prawej stronie schemtat wraz z przykładowym chwytakiem 2FG7 OnRobot.
Siłowy sposób trzymania przedmiotu wykorzystuje siłę tarcia między palcami chwytaka, a obiektem. Jednak w przypadku bardzo śliskiego bądź ciężkiego przedmiotu siła wywierana przez palce chwytaka na obiekt może powodować odkształcenia i uszkodzenia detalu. Po prawej stronie schemtat wraz z przykładowym chwytakiem 2FG7 OnRobot.
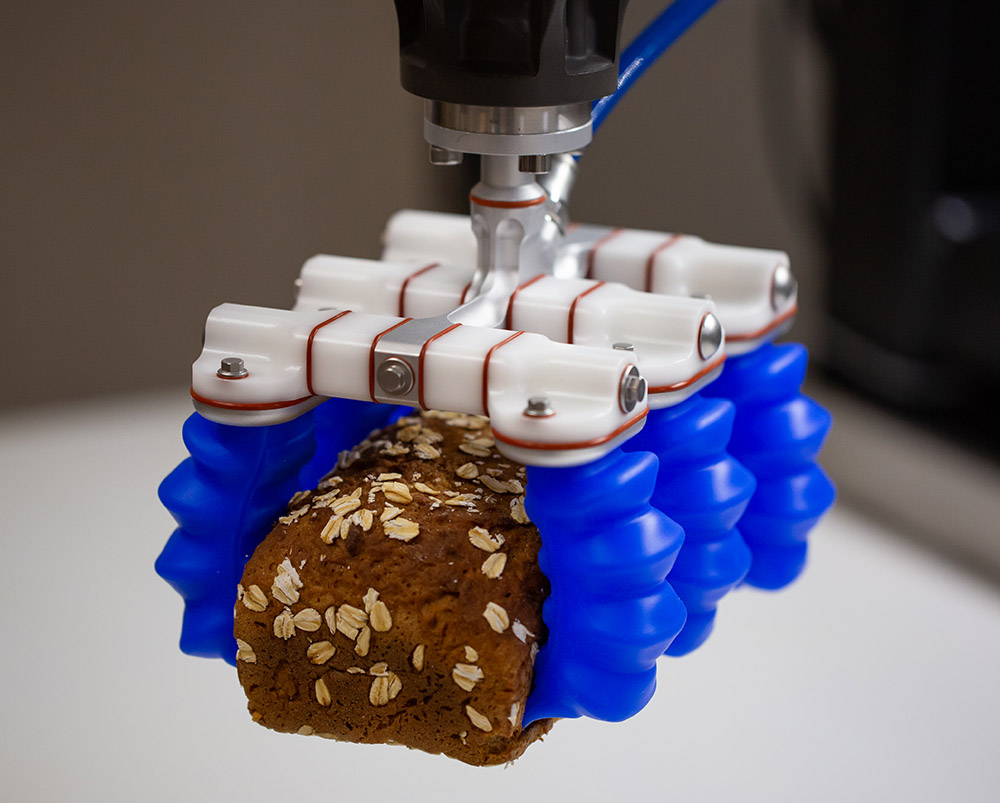
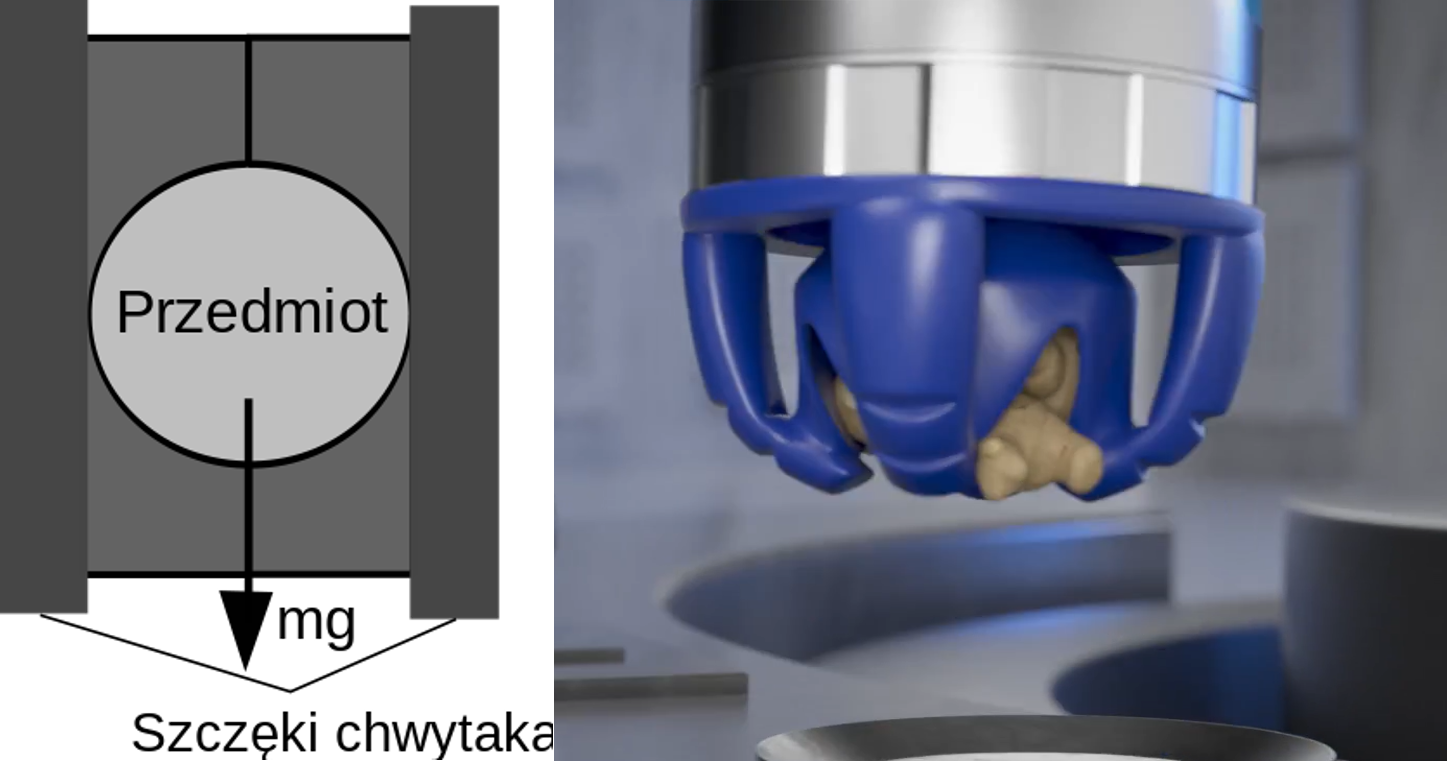 Sposób kształtowy nie wykorzystuje siły, a jedynie odpowiednio dobrany kształt palców chwytaka wykonanego na zamówienie pod konkretny typ detalu. Ten sposób jest rzadko wykorzystywany w robotach współpracujących ze względu na niewielką elastyczność. Jakiś czas temu pojawiły się jednak na rynku chwytaki typu soft, które również mogą wykorzystywać taki sposób chwytania, ale znacznie elastyczniej. To np. Soft Gripper OnRobot.
Sposób kształtowy nie wykorzystuje siły, a jedynie odpowiednio dobrany kształt palców chwytaka wykonanego na zamówienie pod konkretny typ detalu. Ten sposób jest rzadko wykorzystywany w robotach współpracujących ze względu na niewielką elastyczność. Jakiś czas temu pojawiły się jednak na rynku chwytaki typu soft, które również mogą wykorzystywać taki sposób chwytania, ale znacznie elastyczniej. To np. Soft Gripper OnRobot.
 Sposób siłowo-kształtowy wykorzystuje jednocześnie siłę tarcia oraz dopasowanie szczęk do kształtu detalu. Idealnym przykładem będzie dwupalczasty chwytak 2F-85 od Robotiq.
Sposób siłowo-kształtowy wykorzystuje jednocześnie siłę tarcia oraz dopasowanie szczęk do kształtu detalu. Idealnym przykładem będzie dwupalczasty chwytak 2F-85 od Robotiq.
- Przeniesienie napędu
- chwytak równoległy
- chwytak kątowy
- chwytak adaptacyjny
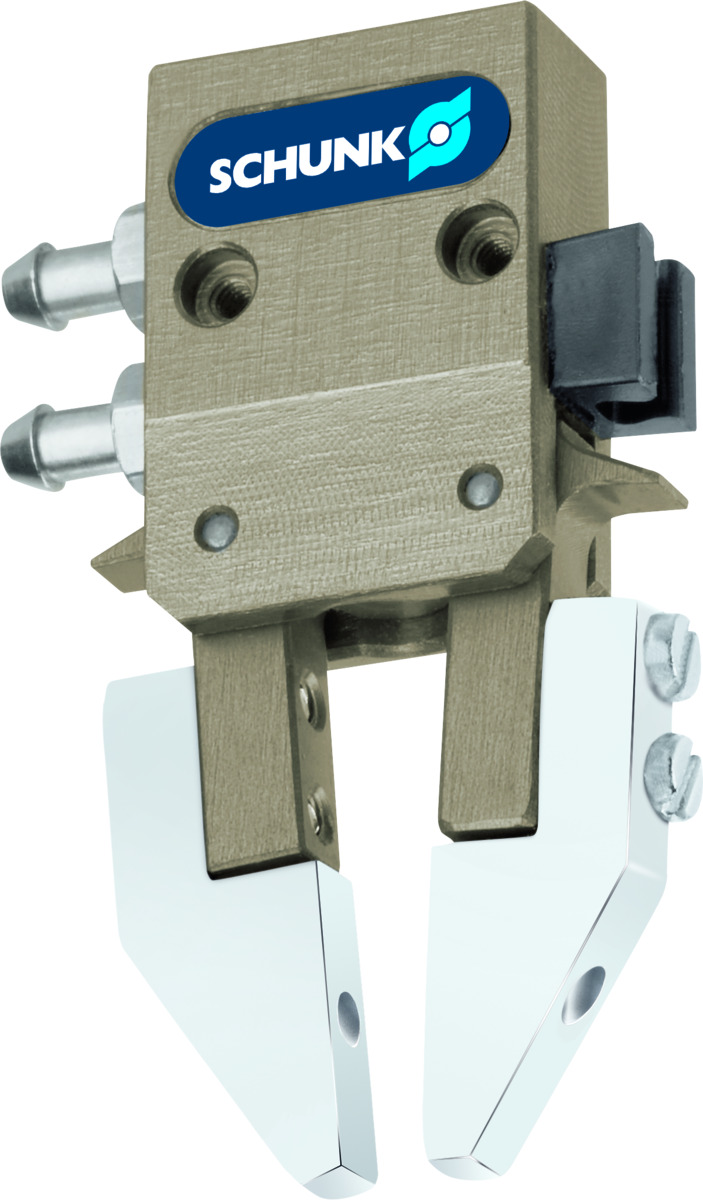
 W przypadku chwytaka równoległego, jego palce poruszają się równolegle względem siebie i zwiększając bądź zmniejszając odległość między sobą. Mogą pracować zarówno od zewnątrz produktu, jak i od wewnątrz. Np. Schunk Co-act EGP-C.
W przypadku chwytaka równoległego, jego palce poruszają się równolegle względem siebie i zwiększając bądź zmniejszając odległość między sobą. Mogą pracować zarówno od zewnątrz produktu, jak i od wewnątrz. Np. Schunk Co-act EGP-C.
 Palce chwytaka kątowego, jak sama nazwa wskazuje, poruszają się względem siebie pod kątem.
Palce chwytaka kątowego, jak sama nazwa wskazuje, poruszają się względem siebie pod kątem.
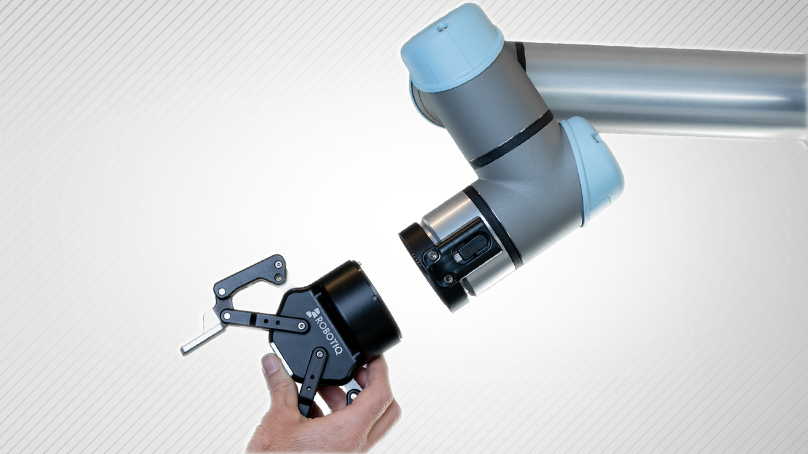
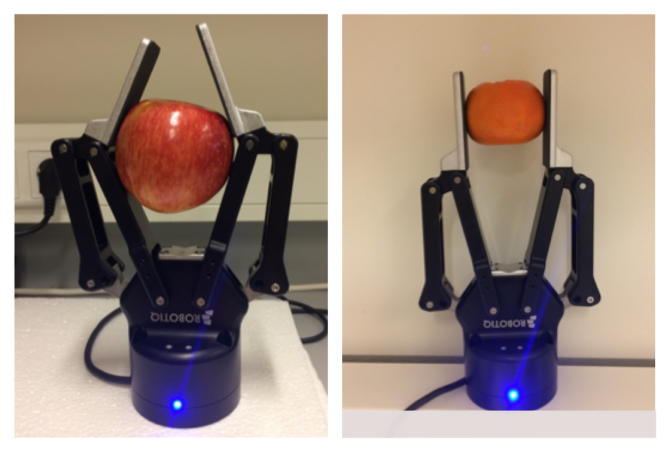 W chwytaku adaptacyjnym każdy palec może poruszać się niezależnie, dzięki czemu dopasowuje się do kształtu przedmiotu. Jest najbardziej uniwersalnym ze wszystkich rozwiązań. Może łączyć ze sobą zarówno siłowy, kształtowy jak i siłowo-kształtowy sposób trzymania, zależnie od elastyczności palców chwytaka, jak i miejsca chwycenia. Na zdjęciu obok widać chwytak Robotiq 2F-140, gdzie z lewej strony przedstawiony został sposób siłowo-kształtowy, z prawej sposób siłowy.
W chwytaku adaptacyjnym każdy palec może poruszać się niezależnie, dzięki czemu dopasowuje się do kształtu przedmiotu. Jest najbardziej uniwersalnym ze wszystkich rozwiązań. Może łączyć ze sobą zarówno siłowy, kształtowy jak i siłowo-kształtowy sposób trzymania, zależnie od elastyczności palców chwytaka, jak i miejsca chwycenia. Na zdjęciu obok widać chwytak Robotiq 2F-140, gdzie z lewej strony przedstawiony został sposób siłowo-kształtowy, z prawej sposób siłowy.
Chwytak podsiśnieniowy (próżniowy)
Chwytak próżniowy najlepiej sprawdzi się do łapania detali o gładkich, płaskich powierzchniach. Jest też często wykorzystywany do chwytania opakowań foliowych i delikatnych elementów. Najczęściej stosowane są pojedyncze ssawki lub powierzchniowe chwytaki podciśnieniowe.
 Pojedyncze ssawki służą do podnoszenia niewielkich lub lekkich przedmiotów. Idealnym przykładem takiego rozwiązania jest EPick firmy Robotiq, który wyposażony jest w różne konfiguracje ssawek. Dzięki temu może chwytać detale o rozmaitych kształtach.
Pojedyncze ssawki służą do podnoszenia niewielkich lub lekkich przedmiotów. Idealnym przykładem takiego rozwiązania jest EPick firmy Robotiq, który wyposażony jest w różne konfiguracje ssawek. Dzięki temu może chwytać detale o rozmaitych kształtach.
 Natomiast modele powierzchniowe są w stanie podnieść ciężkie lub duże przedmioty. Możliwe jest użycie gumowych ssawek lub pianki uszczelniającej, a także kombinacji obu – gumowej ssawki z pianką uszczelniającą.
Natomiast modele powierzchniowe są w stanie podnieść ciężkie lub duże przedmioty. Możliwe jest użycie gumowych ssawek lub pianki uszczelniającej, a także kombinacji obu – gumowej ssawki z pianką uszczelniającą.
 Co daje pianka? Między innymi nie pozostawia śladów na powierzchniach takich jak rozciągliwa folia. Zapewnia chwytanie ładunków o różnorodnych powierzchniach – z nierównościami, chropowatościami i szczelinami. Pozwala obsługiwać elementy z minimalnymi nieszczelnościami.
Co daje pianka? Między innymi nie pozostawia śladów na powierzchniach takich jak rozciągliwa folia. Zapewnia chwytanie ładunków o różnorodnych powierzchniach – z nierównościami, chropowatościami i szczelinami. Pozwala obsługiwać elementy z minimalnymi nieszczelnościami.
 W przypadku, gdy dostępne na rynku chwytaki nie odpowiadają naszym potrzebom, możliwe jest skonstruowanie własnego chwytaka z gotowych podzespołów. Firma PIAB oferuje modułowe przyssawki, dzięki czemu możemy wybrać rodzaj i rozmiar warg, mieszków, podpór itd.
W przypadku, gdy dostępne na rynku chwytaki nie odpowiadają naszym potrzebom, możliwe jest skonstruowanie własnego chwytaka z gotowych podzespołów. Firma PIAB oferuje modułowe przyssawki, dzięki czemu możemy wybrać rodzaj i rozmiar warg, mieszków, podpór itd.
Chwytak adhezyjny
 Adhezja związana jest z oddziaływaniami powierzchniowymi łączonych elementów. W przypadku chwytaków najczęściej jest to siła Van der Waalsa. W prostych słowach – chwytak działa jak palce gekona. Co ciekawe, nie potrzebuje żadnego dodatkowego zasilania, nie pozostawia śladów oraz nadaje się do delikatnych i wrażliwych detali.
Adhezja związana jest z oddziaływaniami powierzchniowymi łączonych elementów. W przypadku chwytaków najczęściej jest to siła Van der Waalsa. W prostych słowach – chwytak działa jak palce gekona. Co ciekawe, nie potrzebuje żadnego dodatkowego zasilania, nie pozostawia śladów oraz nadaje się do delikatnych i wrażliwych detali.
Aby chwycić element należy zrobić to samo, co w przypadku zwykłych przyssawek – wywrzeć delikatny nacisk na przedmiot. Zwolnienie chwytaka jest bardziej skomplikowane, można to zrobić za pomocą ruchu obrotowego, przechylania albo ruchu ślizgowego.

Chwytak Bernoulliego
Nadaje się do porowatych i szorstkich przedmiotów. Można z jego pomocą podnieść tekstylia, elementy perforowane, a także nierówne, bez fizycznego kontaktu i eliminując deformacje. Do zasilania potrzebne jest jedynie sprężone powietrze. Ze względu na brak fizycznego kontaktu stosowany jest często w przypadku obiektów sterylnych.

Chwytak magnetyczny
Jest to urządzenie mogące podnieść materiały ferromagnetyczne. Możliwe jest regulowanie siły, a czasami nawet wykrywanie części. Jest w stanie podnieść perforowane, nieregularne i zakurzone elementy. Niewątpliwą zaletą takich chwytaków jest możliwość łapania obiektów za gładkie powierzchnie. Najczęściej też nie pozostawia on śladów na materiale i nadaje się do przenoszenia arkuszy blachy. Jednym z takich efektorów jest MG10 od OnRobot.
Chwytak typu soft
Nie jest to właściwie typ zaawansowanej technologii, a raczej sposób działania. Takie chwytaki mają bardzo miękki chwyt, co czyni je idealnymi przy kruchych produktach. Bardzo dobrze sprawdzają się w przemyśle spożywczym.
Sposoby delikatnego łapania detali są różne, mogą to być m.in. palce, kołnierz czy balon.
 Chwytak Festo DHEF przestawiony na rysunku obok dopasowuje się do kształtu obiektu i dodatkowo wykorzystuje efekt przyssawki. Działa na podobnej zasadzie, co język kameleona.
Chwytak Festo DHEF przestawiony na rysunku obok dopasowuje się do kształtu obiektu i dodatkowo wykorzystuje efekt przyssawki. Działa na podobnej zasadzie, co język kameleona.
Ciekawym rozwiązaniem (choć jeszcze niezbyt powszechnym) jest chwytak zbudowany z… balona wypełnionego kawą! Balon jest przyciskany do chwytanej powierzchni, następnie zostaje z niego wyssane powietrze, chwytak twardnieje i możliwe jest podniesienie detalu. Można w ten sposób podnieść np. szklankę lub jajko. Mimo swojej zaskakująco „domowej” budowy, kilka firm podjęło się zbudowania bardziej komercyjnej wersji tego wynalazku. Powszechnie występuje on pod nazwą jamming gripper, co ma związek z procesem ściskania kawy na skutek wysysania powietrza.
Chwytaki dedykowane i specjalne
 Wymienione wyżej chwytaki są rozwiązaniami uniwersalnymi – ich zastosowanie zależy głównie od rodzaju powierzchni detalu lub sposobu chwytania. W przypadku produktów wymagających szczególnego, specyficznego chwytu można wykorzystać gotowe rozwiązania do specjalnych zastosowań bądź zlecić wykonanie spersonalizowanego chwytaka. Przykładem chwytaka do specjalnych zastosowań jest ten wykorzystywany w rozwiązaniu CoBo-Stack firmy Komori. Jest on przystosowany wyłącznie do przenoszenia papieru.
Wymienione wyżej chwytaki są rozwiązaniami uniwersalnymi – ich zastosowanie zależy głównie od rodzaju powierzchni detalu lub sposobu chwytania. W przypadku produktów wymagających szczególnego, specyficznego chwytu można wykorzystać gotowe rozwiązania do specjalnych zastosowań bądź zlecić wykonanie spersonalizowanego chwytaka. Przykładem chwytaka do specjalnych zastosowań jest ten wykorzystywany w rozwiązaniu CoBo-Stack firmy Komori. Jest on przystosowany wyłącznie do przenoszenia papieru.
Każda aplikacja wymaga indywidualnego podejścia i choć trwają prace nad stworzeniem jak najbardziej uniwersalnego chwytaka, to wciąż nie jest on w stanie spełnić wszystkich oczekiwań. Dobrze dobrany efektor jest kluczowym aspektem podczas tworzenia aplikacji, dlatego warto skorzystać z pomocy specjalisty.
Chętnie pomożemy Ci wybrać najlepsze rozwiązanie i odpowiemy na wszystkie Twoje pytania.
![]()