


Przemiennikami częstotliwości Unitronics można sterować nie tylko poprzez UniLogic. Jeśli do sterowania falownikiem zostaje wykorzystany sterownik Vision to możemy zadawać częstotliwość, kierunek obrotów, sprawdzać błędy czy wgrywać konfigurację. W tej instrukcji pokazane zostanie połączenie falownika UMI-0015BE-B1 oraz sterownika Vision V130-33-TR20.
Powrót do Akademi Falowników Unitronics
Spis treści
- Połączenie zwojów silnika w konfigurację trójkąt
- Połączenie falownika przewodem z uziemionym ekranem
- Podłączenie zasilania falownika
- Podłączenie RS485
- Konfiguracja falownika w programie VisiLogic
- Korzystanie z napędów VFD firmy Unitronics w programie VisiLogic
- Gotowa aplikacja do sterowania falownikiem Unitronics
- Podsumowanie
Połączenie zwojów silnika w konfigurację trójkąt
W zależności od zasilania falownika oraz rodzaju silnika, należy się upewnić w jaki sposób połączyć uzwojenia silnika. Główną zasadą jest to, iż falownik z zasilaniem jednofazowym, na wyjściu da 230V, natomiast falownik z zasilaniem trójfazowym - 400V. To, w jaki sposób należy podłączyć silnik, można odczytać z tabliczki znamionowej silnika:
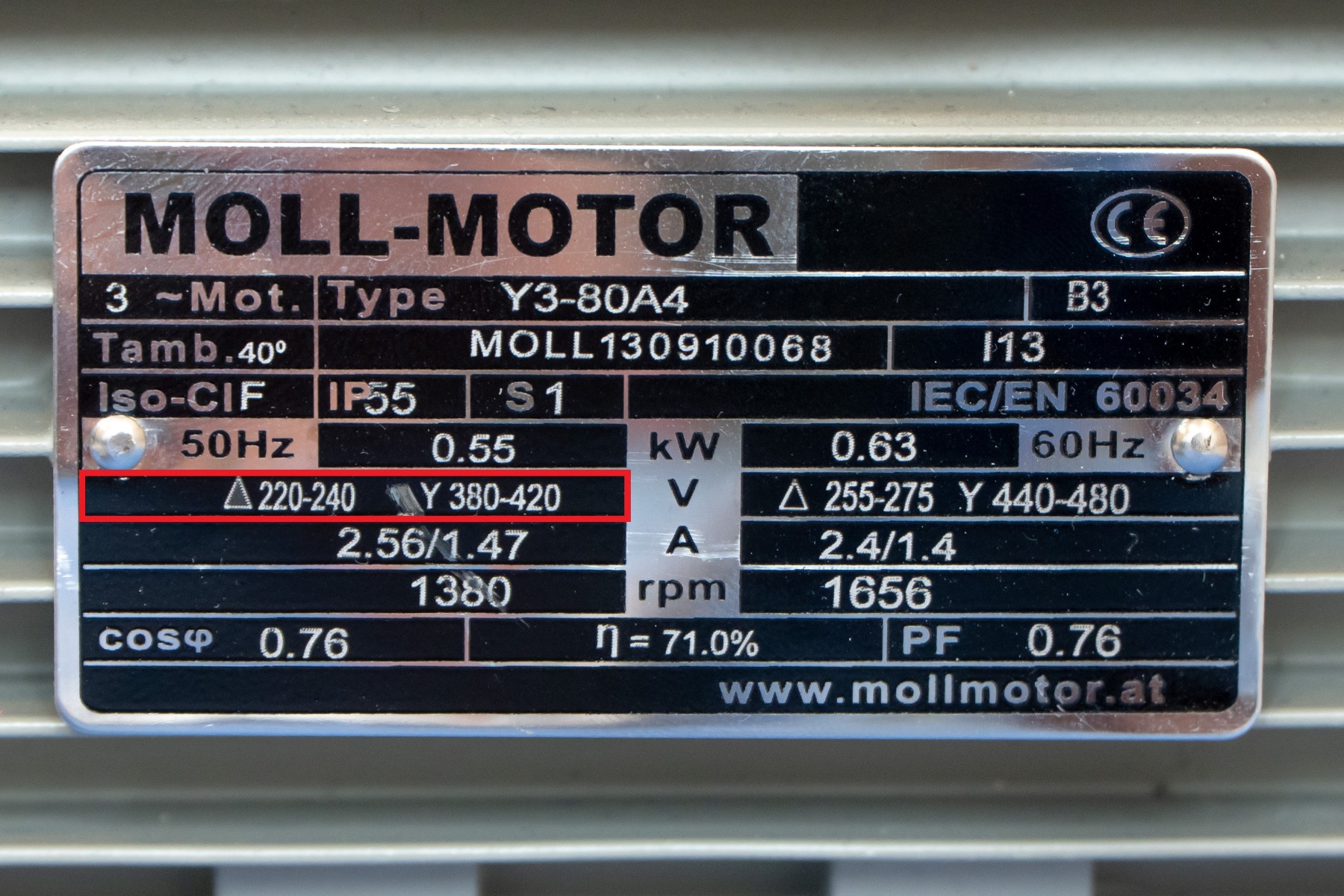
W Polsce, w gniazdkach elektrycznych, obowiązuje częstotliwość 50Hz. Dlatego też na tabliczce znamionowej odczytujemy parametry dla częstotliwości 50Hz.
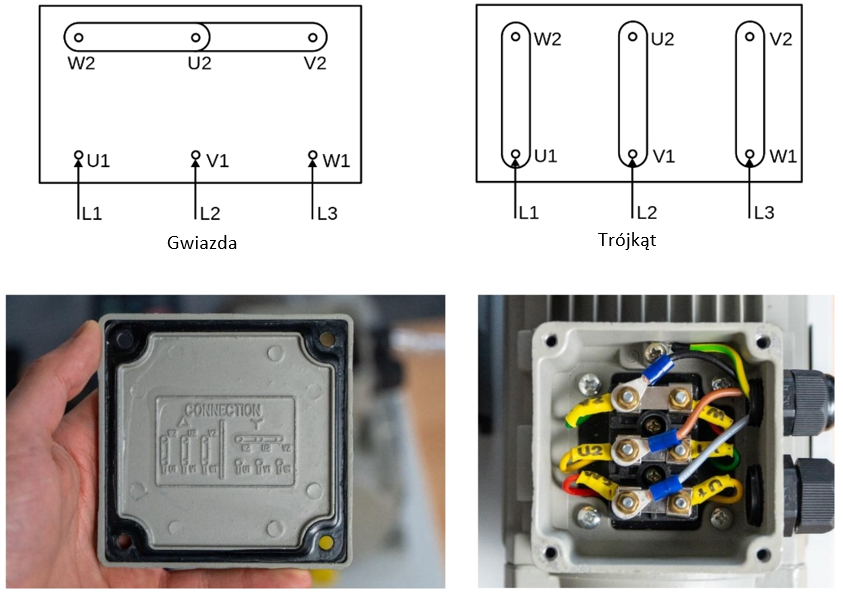
Z tabliczki wynika, iż przy połączeniu silnika z falownikiem jednofazowym (230V), należy połączyć go w trójkąt, natomiast przy połączeniu z falownikiem trójfazowym (400V) w gwiazdę. Prawidłowe podłączenie uzwojeń można zobaczyć na odwrocie pokrywy silnika.
Połączenie falownika przewodem z uziemionym ekranem
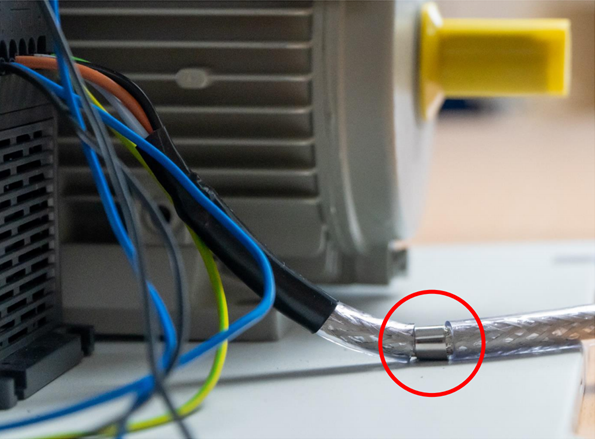
Zastosowanie nieekranowanego kabla do połączenia falownika z silnikiem jest częstym powodem zakłóceń w prawidłowym działaniu urządzeń wchodzących w skład instalacji, gdzie pracuje falownik. Trzeba pamiętać, że podczas pracy falownik emituje duże zakłócenia elektromagnetyczne, które mogą zostać zniwelowane poprzez zastosowanie ekranowego przewodu podłączonego do uziemienia.
Do podłączenia silnika do falownika, służą zaciski U, V, W.
Podłączenie zasilania falownika
W zależności od modelu falownika, może on być zasilany jedno- lub trój-fazowo. Zasilanie trójfazowe występuje w pełnym zakresie mocy falowników Unitronics, tj. od 0,4kW do 110kW i powyżej, natomiast zasilanie jednofazowe występuje w modelach najniższej mocy, do maksymalnie 2,2kW.
Wejścia zasilania najczęściej oznaczane są literami:
- L / N / PE – przy zasilaniu jednofazowym
- R / S / T / PE – przy zasilaniu trójfazowym
Zaciski (+) oraz (PB) służą do podłączenia rezystora hamującego.
Podłączenie RS485
Aby mieć pewność, że komunikacja poprzez port RS485 będzie działać prawidłowo, należy odkręcić tylną obudowę V130-33-TR20 (cztery śruby na rogach obudowy) a następnie przełożyć dwie zworki na pozycje RS485:
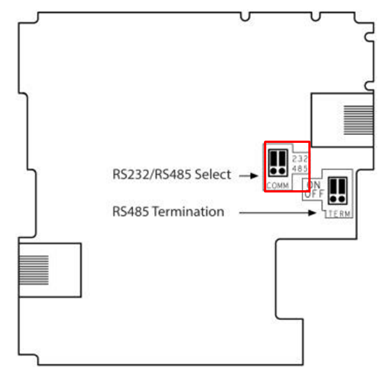
Terminacja przy kablu <1m nie jest wymagana. Po założeniu obudowy należy wykonać kabel z końcówką RJ12 z podłączonymi dwoma pinami skrajnymi (1 oraz 6):
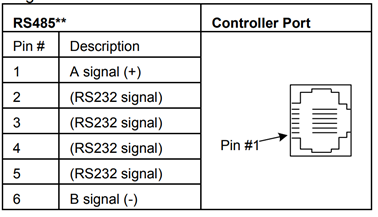
Gdzie:
- Wejście RS485+ jest podłączone do zacisku A+ (pin 1) sterownika
- Wejście RS485- falownika jest podłączone do zacisku B- (pin 6) sterownika
- Wejście COM falownika jest podłączone do zacisku 0V zasilacza sterownika
- Po obu stronach (przy falowniku oraz sterowniku) jest załączona (bądź wyłączona) terminacja
- Falownik oraz sterownik są prawidłowo uziemione
- Do połączeń stosowane są ekranowane kable, w celu zniwelowania zakłóceń elektromagnetycznych
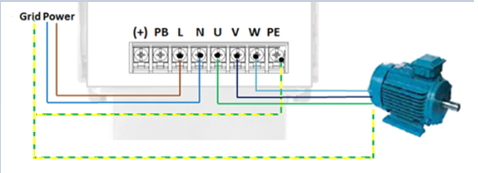
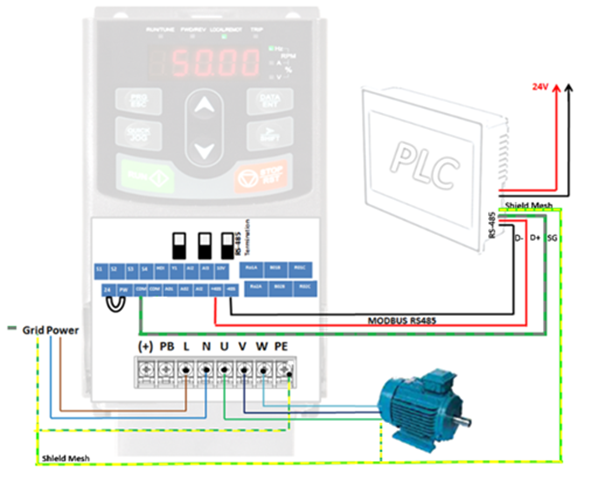
Prawidłowe podłączenie falownika – komunikacja oraz zasilanie, zostało przedstawione na rysunku poniżej:
Konfiguracja falownika w programie VisiLogic
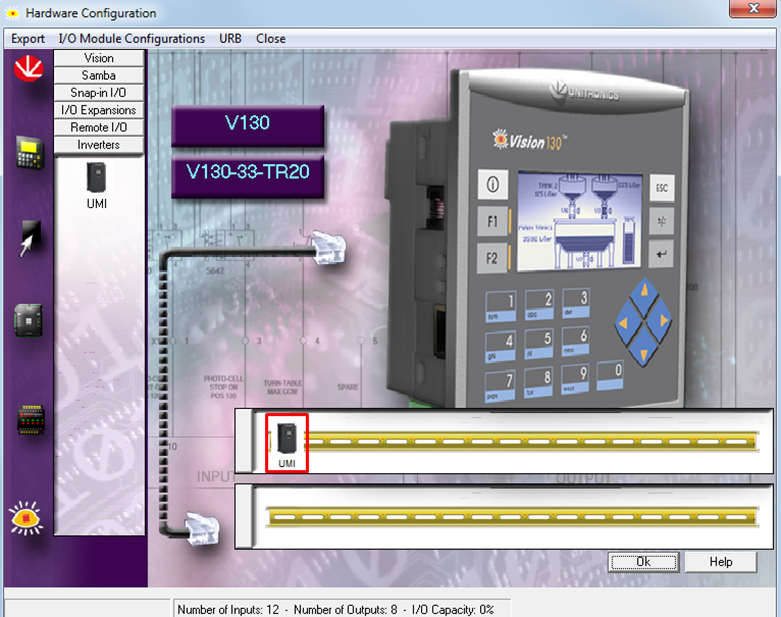
Po dodaniu VFD do konfiguracji sprzętowej VisiLogic automatycznie dodaje podprogramy i tabele danych do aplikacji, które umożliwiają uruchamianie falownika z poziomu aplikacji. Te podprogramy są ukryte, ponieważ nie można ich edytować. VisiLogic rezerwuje wektory zmiennych „Global” MB, MI i DW. Możesz zmienić operand początkowy wektora, ale nie możesz dokonywać żadnych innych zmian lub używać zmiennych w tych wektorach w swojej aplikacji. Może to spowodować niepowodzenie aplikacji. W konfiguracji sprzętu (Hardware Configuration) wybierz UMI z paska wyboru Element sprzętowy i przeciągnij VFD na szynę DIN; otworzy się okno Konfiguracja.
1. Wybierz port szeregowy, który ma być podłączony do VFD. W sekcji Global możesz edytować początkowe wektory zmiennych globalnych; te wektory są zarezerwowane do użytku w podprogramach VFD.
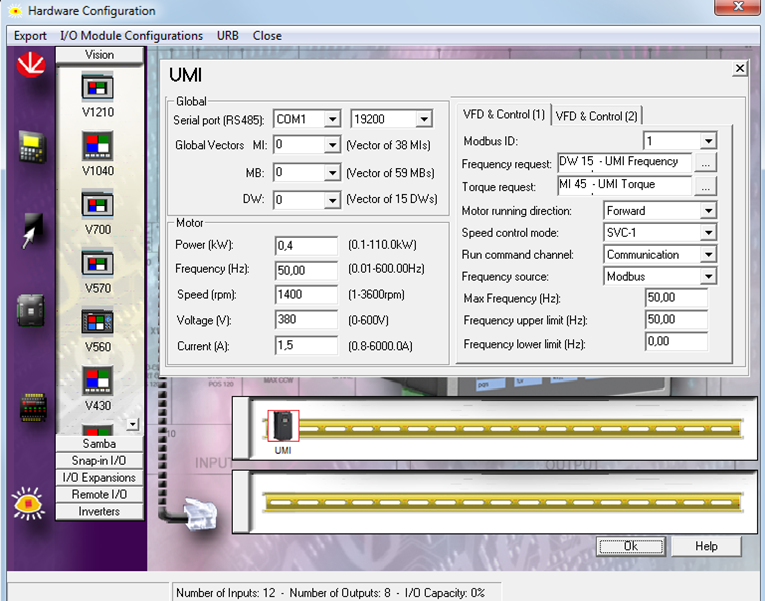
2. W obszarze Silnik wprowadź parametry konkretnego modelu silnika.
3. W obszarze VFD & Control (1), znajdują się zmienne do nadawania częstotliwości (Frequency Request) oraz ustawiania momentu obrotowego (Torque request) użyjesz ich w swoim programie do sterowania częstotliwością i momentem obrotowym. Edytuj wartości w VFD & Control (1) oraz VFD & Control (2) zgodnie z parametrami modelu UMI i wymaganiami aplikacji. Parametry te zostaną zapisane w tabeli danych utworzonej przez VisiLogic, Configuration Table. Zwróć uwagę, że w tej tabeli danych VisiLogic dodaje wiersz zawierający dane dla każdego UMI dołączonego do aplikacji.
4. Po zakończeniu kliknij OK.
Zwróć uwagę, że VisiLogic dodał:
- Tabelę konfiguracji zawierająca parametry, które sterownik zapisze w falowniku,
- Tabelę stanu, której można używać do zarządzania i debugowania sterowania ruchem.
Pierwsza linijka kodu programu, która wywołuje podprogram UNI_UMI_Main, która uruchamia logikę falownika.
Korzystanie z napędów VFD firmy Unitronics w programie VisiLogic
Wysyłanie poleceń do falownika:
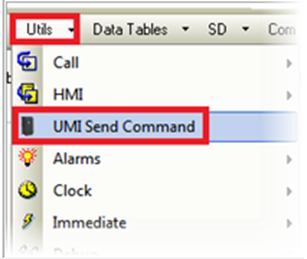
1. Na pasku narzędzi drabinki w menu Utils wybierz polecenie UMI Send Command:
2. Wybierz komendę dla żądanego falownika:
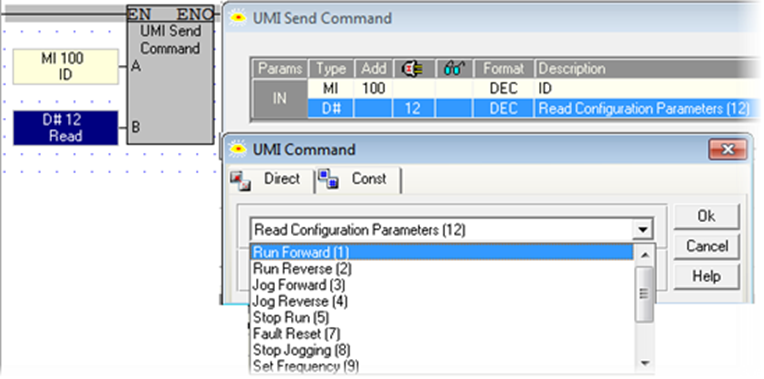
3. Wybierz kolejną komendę.
Numery poleceń:
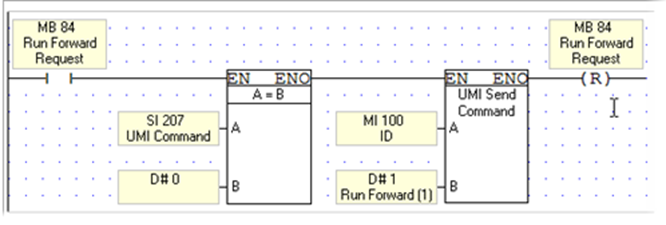
- 1 Bieg do przodu
- 2 Bieg wstecz
- 3 Jog Przód
- 4 Jog Wstecz
- 5 Stop ruchu
- 6 zarezerwowane
- 7 Reset błędów
- 8 Stop Jog
- 9 Ustaw częstotliwość
- 10 Uruchom Tryb momentowy
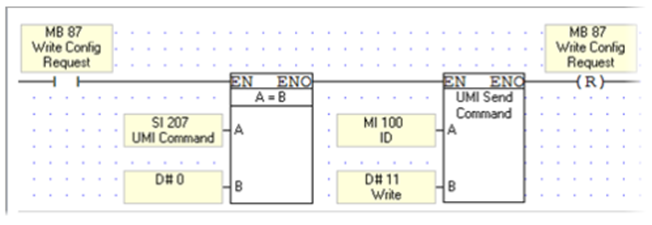
- 11 Wpisz parametry konfiguracyjne
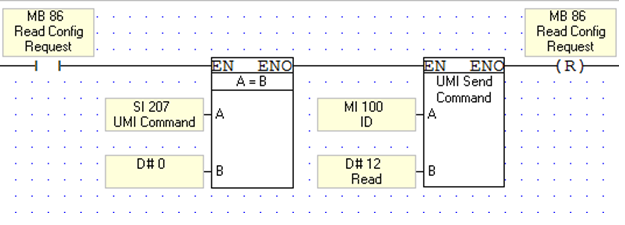
- 12 Wczytaj parametry konfiguracyjne
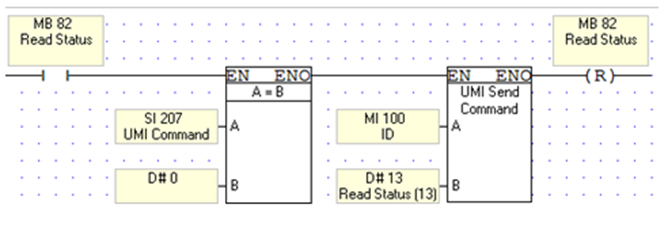
- 13 Czytaj status
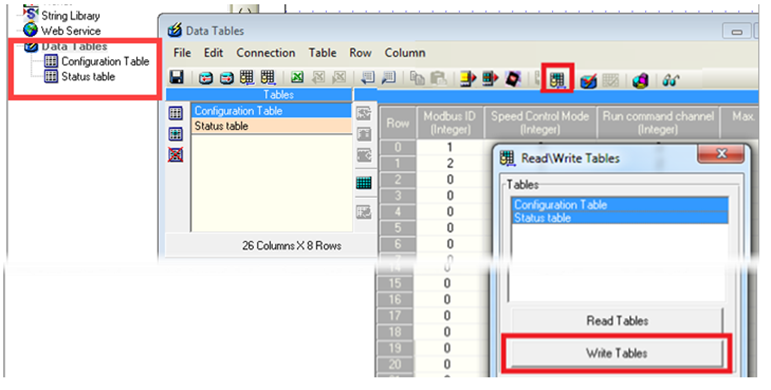
Po pobraniu aplikacji należy zapisać wartości parametrów w tabelach danych „Configuration Table” oraz „Status Table”, a następnie wgrać te wartości z tabel danych do sterownika PLC:
1) W drzewie nawigacyjnym kliknij opcję Data Tables, a następnie ikonę Read/Write Tables. Zaznacz obie tabele, naciskając klawisz CTRL + prawy przycisk myszy, a następnie wybierz opcję Write Tables.
2) W aplikacji Ladder zapisz parametry konfiguracyjne za pomocą komendy 11 - Zapisz parametry konfiguracyjne, jak pokazano na szczeblu poniżej:
3) Można również odczytać parametry z VFD do tabeli danych konfiguracyjnych za pomocą komendy 12 - Odczytaj parametry konfiguracyjne:
Sterowanie falownikiem VFD
Możesz wysyłać polecenia sterujące do VFD, takie jak Ruch do przodu, Ruch wstecz, Stop itp.
Poniższy szczebel pokazuje, jak wysłać komendę 1 – Ruch do przodu:
Czytanie statusu
Możesz odczytać statusy z UMI za pomocą komendy 13. Wartości statusów VFD zostaną zapisane w tabeli danych „Tabela stanu”:
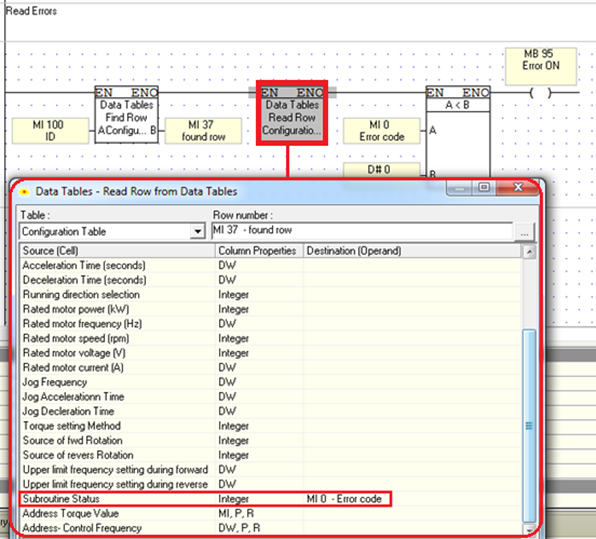
Sprawdzanie błędów
Aby sprawdzić, czy komendy do falownika zostały wysłane poprawnie, należy odczytać kolumnę „Subroutine Status” z tabeli danych konfiguracyjnych. W tym celu należy znaleźć poprawne MODBUS ID falownika VFD w tabeli danych, a następnie przeczytać status podprogramu. Należy zauważyć, że za każdym razem, gdy komenda jest wysyłana do falownika, aktualizowana jest kolumna tabeli danych „Subroutine Status”). Jeśli wartość jest ujemna, oznacza to, że wystąpił błąd przy ostatniej komendzie wysłanej do VFD.
Opis kodów błędów:
- 0 No errors
- 1 In progress
- -1 Failed Reading Speed control mode
- -2 Failed Reading Run command channel
- -3 Failed Reading Max. output frequency
- -4 Failed Reading Upper limit of the running frequency
- -5 Failed Reading Lower limit of the running frequency
- -6 Failed Reading Frequency command selection A
- -7 Failed Reading Acceleration Time
- -8 Failed Reading Declaration Time
- -9 Failed Reading Running direction selection
- -10 Failed Reading Motor power
- -11 Failed Reading Motor Frequency
- -12 Failed Reading Motor speed
- -13 Failed Reading Motor voltage
- -14 Failed Reading Motor current
- -15 Failed Reading Jog Frequency
- -16 Failed Reading Jog Acceleration Time
- -17 Failed Reading Jog declaration Time
- -18 Failed Reading Torque setting Method
- -19 Failed Reading- Source of Forward Rotation
- -20 Failed Reading- Source of Reverse Rotation
- -23 Failed Writing Speed control mode
- -24 Failed Writing Run command channel
- -25 Failed Writing Max. output frequency
- -26 Failed Writing Upper limit of the running frequency (Please check that the value is not greater than Max output frequency or lower than lower limit of the running frequency)
- -27 Failed Writing Lower limit of the running frequency (Please check that the value is not greater than Max output frequency or greather than upper limit of the running frequency)
- -28 Failed Writing Frequency command selection A
- -29 Failed Writing Acceleration Time
- -30 Failed Writing Deceleration Time
- -31 Failed Writing Running direction selection
- -32 Failed Writing Motor power
- -33 Failed Writing Motor Frequency
- -34 Failed Writing Motor speed
- -35 Failed Writing Motor voltage
- -36 Failed Writing Motor current
- -37 Failed Writing Jog Frequency
- -38 Failed Writing Jog Acceleration Time
- -39 Failed Writing Jog deceleration Time
- -40 Failed Writing Torque setting Method
- -41 Failed Writing-Source of Forward Rotation
- -42 Failed Writing-Source of Reverse Rotation
- -43 Failed Writing-Upper limit frequency setting during forward
- -44 Failed Writing-Upper limit frequency setting during reverse
- -45 General reading status error
- -46 Failed to Send Run Forward
- -47 Failed to Send Run Reverse
- -48 Failed to Send Jog Forward
- -49 Failed to Send Jog Reverse
- -50 Failed to Send Stop Run
- -51 Failed to Send Fault reset
- -52 Failed to Send Stop Jogging
- -53 Failed to Send Set Frequency
- -54 Failed to Send Torque value (Please check that Speed control mode P00.00 is 0 or 1 and Torque setting mode selection should be 7 (MODBUS))
- -999 Slave ID (VFD) not found (Please check if the ID exist in Data table column MODBUS ID)
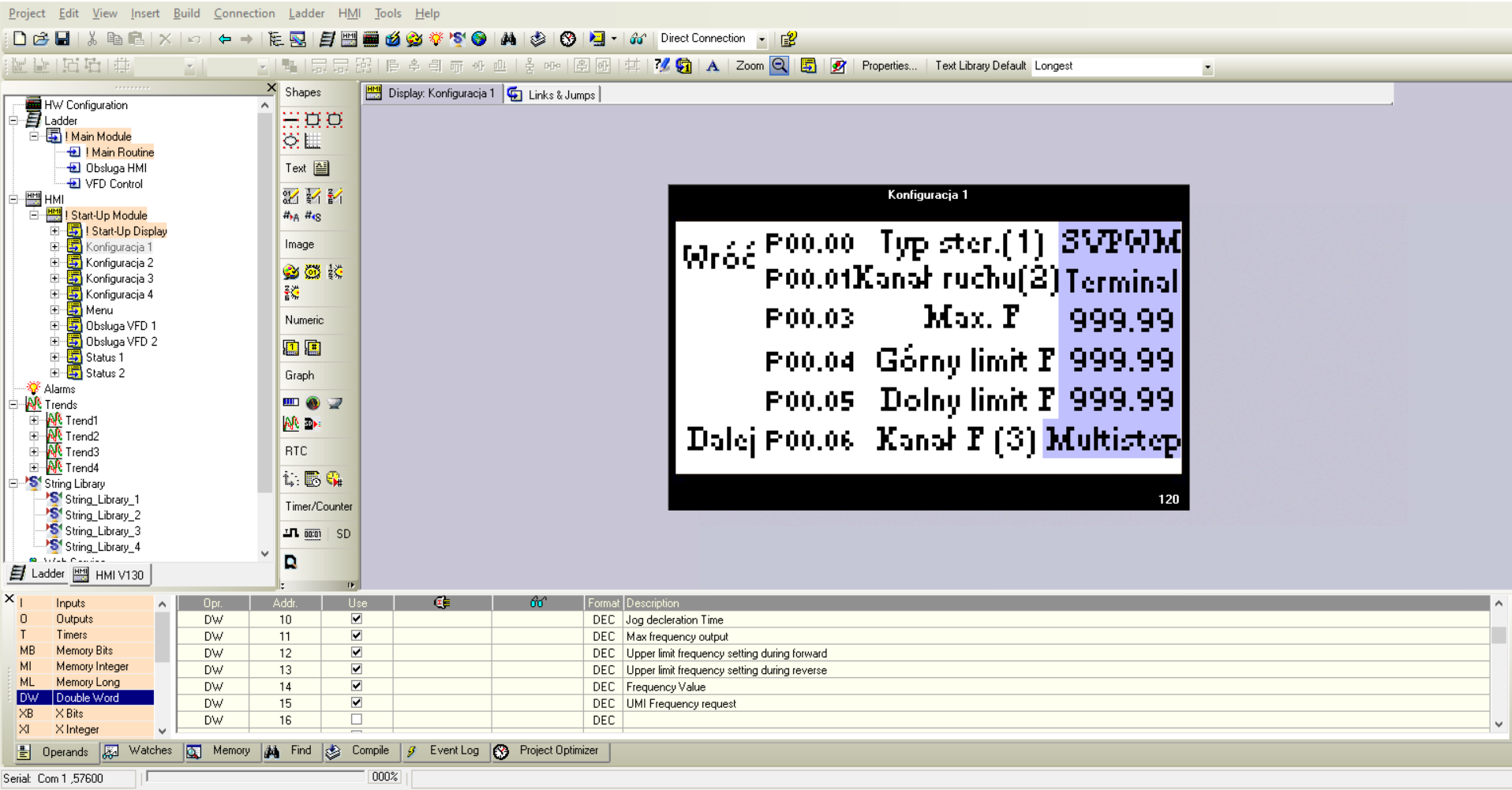
Gotowa aplikacja do sterowania falownikiem Unitronics
W ramach ułatwienia i wdrożenia przemienników Unitronics do Państwa aplikacji lub obiektu stworzyliśmy gotową apikację na sterownik V130-33-TR20 oraz przemiennik częstotliwości UMI-0015BE-B1. Poprzez panel HMI dostępny na urządzeniu można:
- Sparametryzować najważniejsze parametry przemiennika częstotliwości, tj.: sposób komunikacji, źródło częstotliwości, limity częstotliwości, wartość prędkości JOG i inne
- Wgrać konfigurację na przemiennik;
- Zgrać już istniejącą konfigurację z falownika;
- Sterować pracą falownika i silnika elektycznego;
- Monitorować parametry pracy falownika oraz silnika.
>> POBIERZ GOTOWY PROGRAM TUTAJ <<
Podsumowanie
Konfiguracja oraz sterowanie falownikiem poprzez program VisiLogic jest mniej intuicyjne ( i przyjemniejsze) niż w programie UniLogic - jednak tak samo skuteczne. Jeśli będziesz miał problemy z konfiguracją, doborem lub pytania z tematu przemienników częstotliwości zapraszamy do akademii falowników Unitronics. Jeśli nie znajdziesz tam tego, czego szukasz skontaktuj się z nami pod adresem sterowniki@elmark.com.pl
Powrót do Akademi Falowników Unitronics





























